| Equipos | Cursos | Grados | Masters | Gestión |
Núm. Equipos: 28
Ascensor Didáctico | |
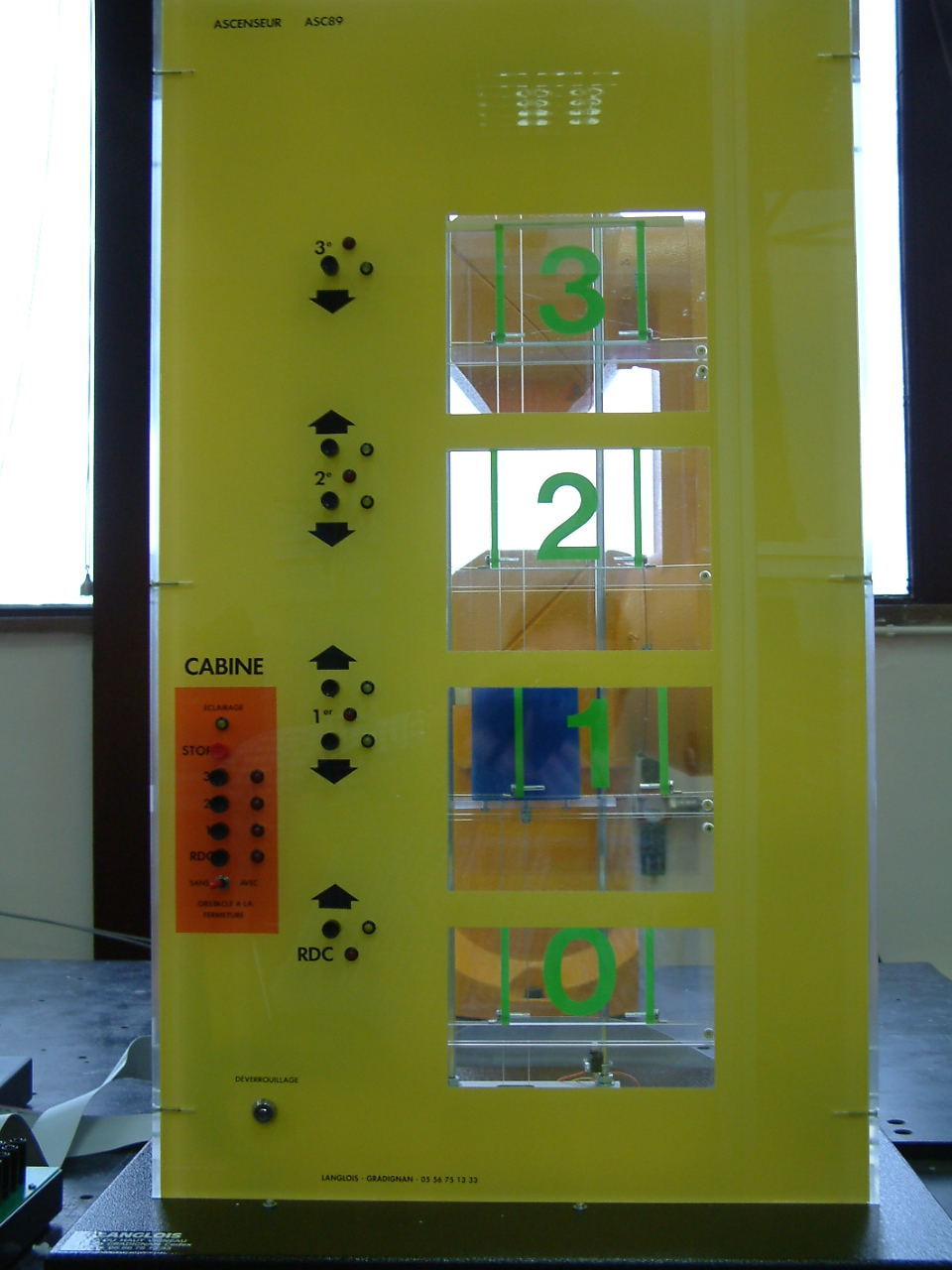 | Universidad: Universidad Politécnica de Cataluña Descripción: Ascensor Didáctico para control mediante PLC. Fabricante: Langlois France Temas: Automatización |
Autómata Schneider TSX P57 254 | |
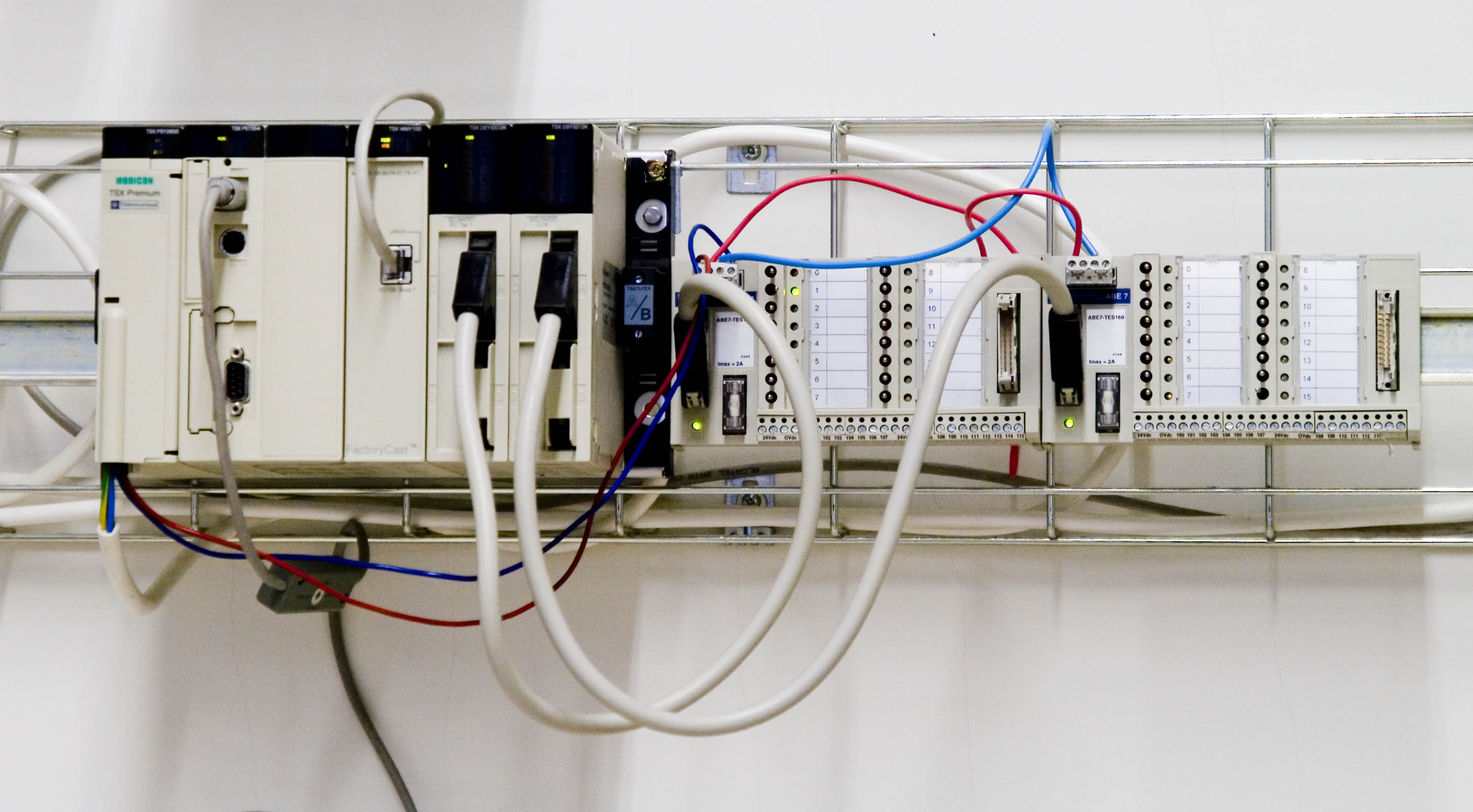 | Universidad: Universidad de León Descripción: Esta modelo de autómata de Schneider se basa en un procesador Premium TSX P57 254. La estación se compone de un módulo de 32 entradas digitales (TSX DEY 32D2K), un módulo de 32 salidas digitales (TSX DSY 32T2K) y un módulo de comunicaciones (TSX WMY 100). El módulo TSX WMY 100 permite establecer una comunicación Ethernet con el autómata desde un terminal y proporciona funciones adicionales, como pueden ser los servicios, DHCP, SNMP, Web, Global Data y notificación por correo de eventos. Fabricante: Guiones Prácticas: Enlace Temas: Automatización |
Autómata Simatic S7-200 | |
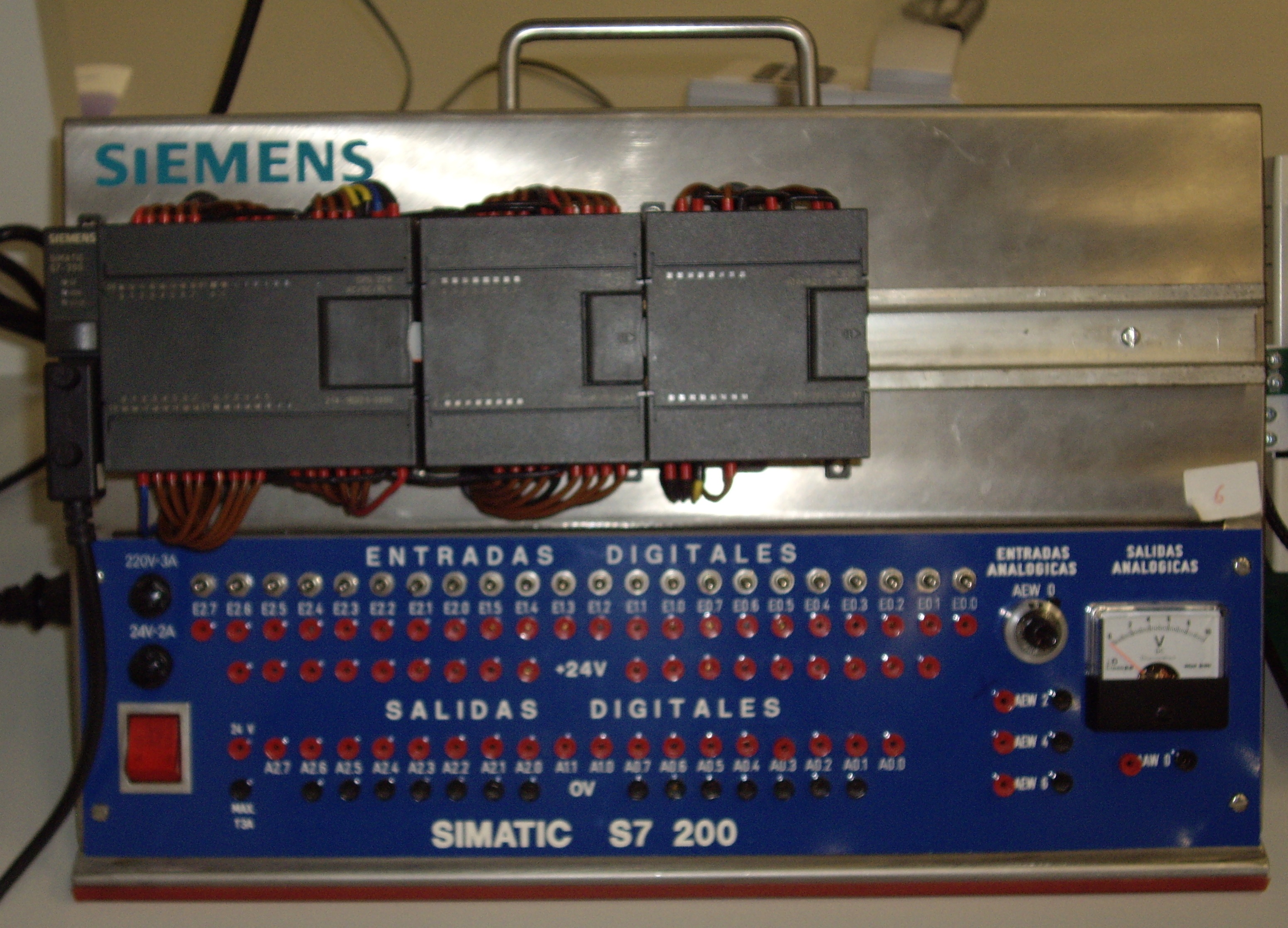 | Universidad: Universidad Miguel Hernández Descripción: Automata semicompacto Siemens de la gama básica. El kit integra la CPU, E/S digitales, y módulo E/S analógicas. Programación en STEP7 (KOP,AWL) mediante el software Micro/Win. Fabricante: Siemens Guiones Prácticas: Enlace Temas: Automatización |
Autómata Simatic S7-300 | |
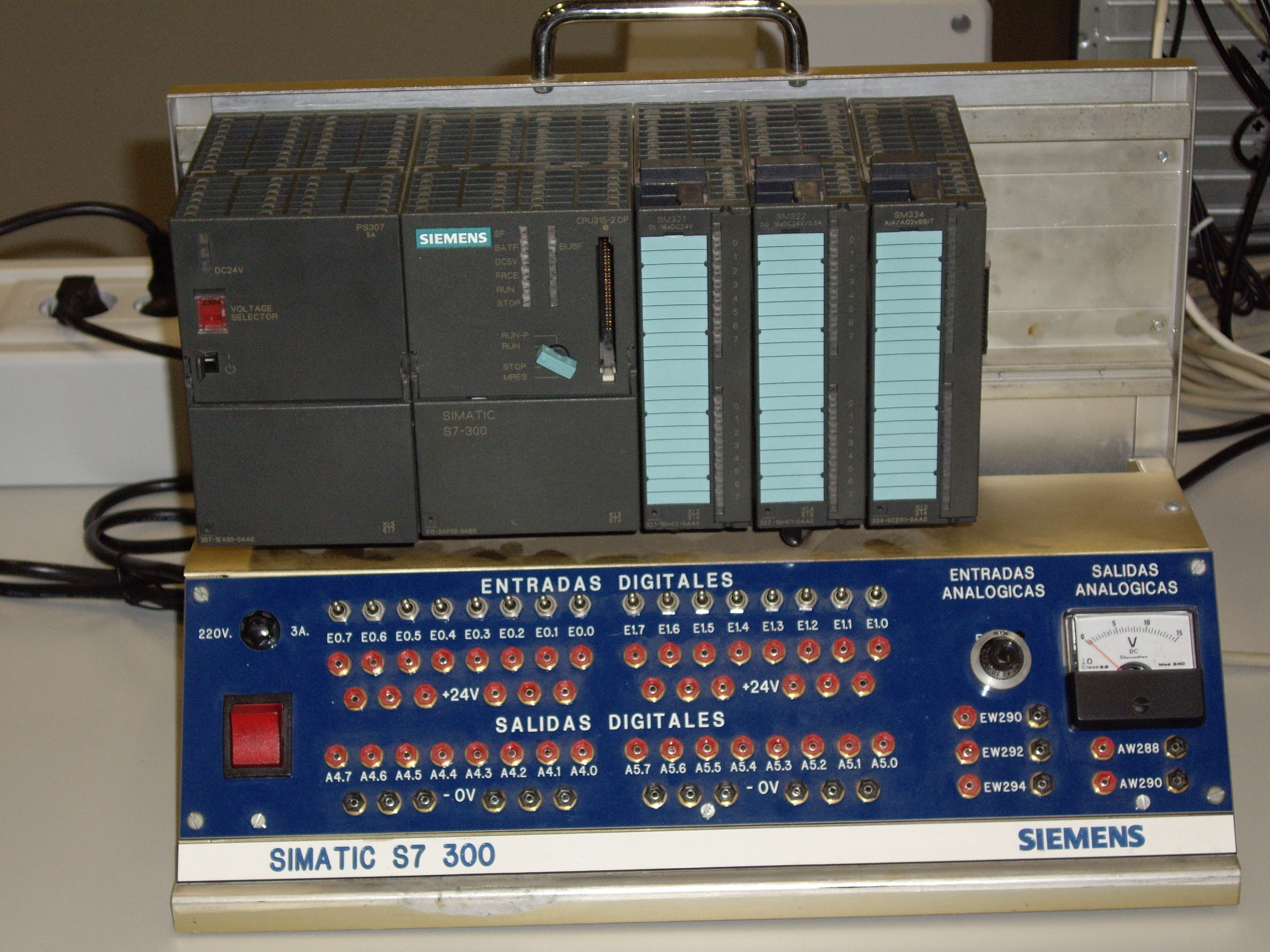 | Universidad: Universidad Miguel Hernández Descripción: Autómata modular Siemens de gama media. El kit dispone de los máulos CPU, E/S digitales, E/S analógicas, Comunicaciones Profibus. Fabricante: Siemens Guiones Prácticas: Enlace Temas: Automatización |
Deposito MD-544 | |
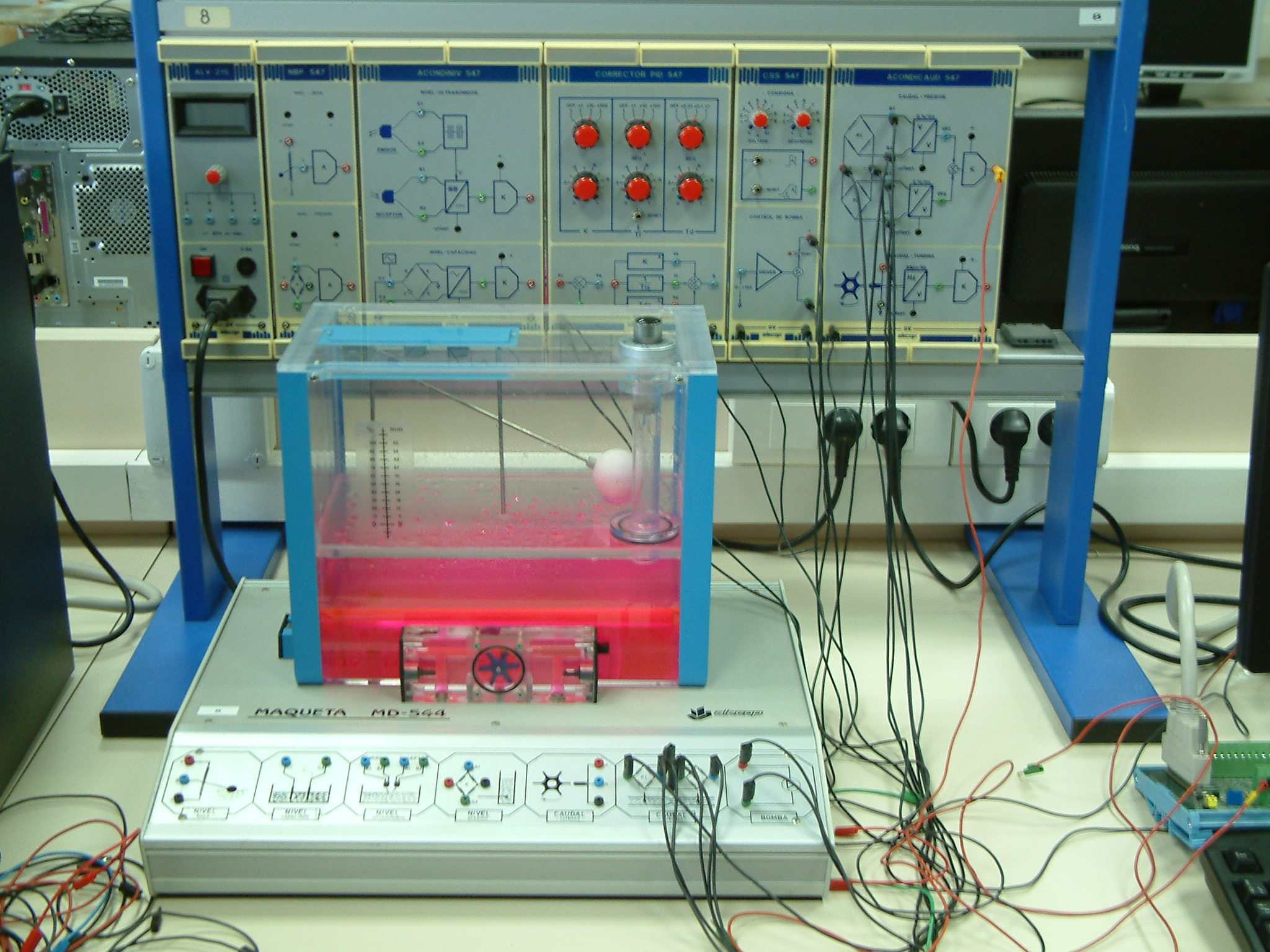 | Universidad: Universidad Politécnica de Cataluña Descripción: Depósito con aplicación al control lineal, dinámicas lentas, control de nivel, control de flujo. Fabricante: Alecop Temas: Control Clásico |
Equipo Feedback (Serie 150) de control de motor de corriente continua | |
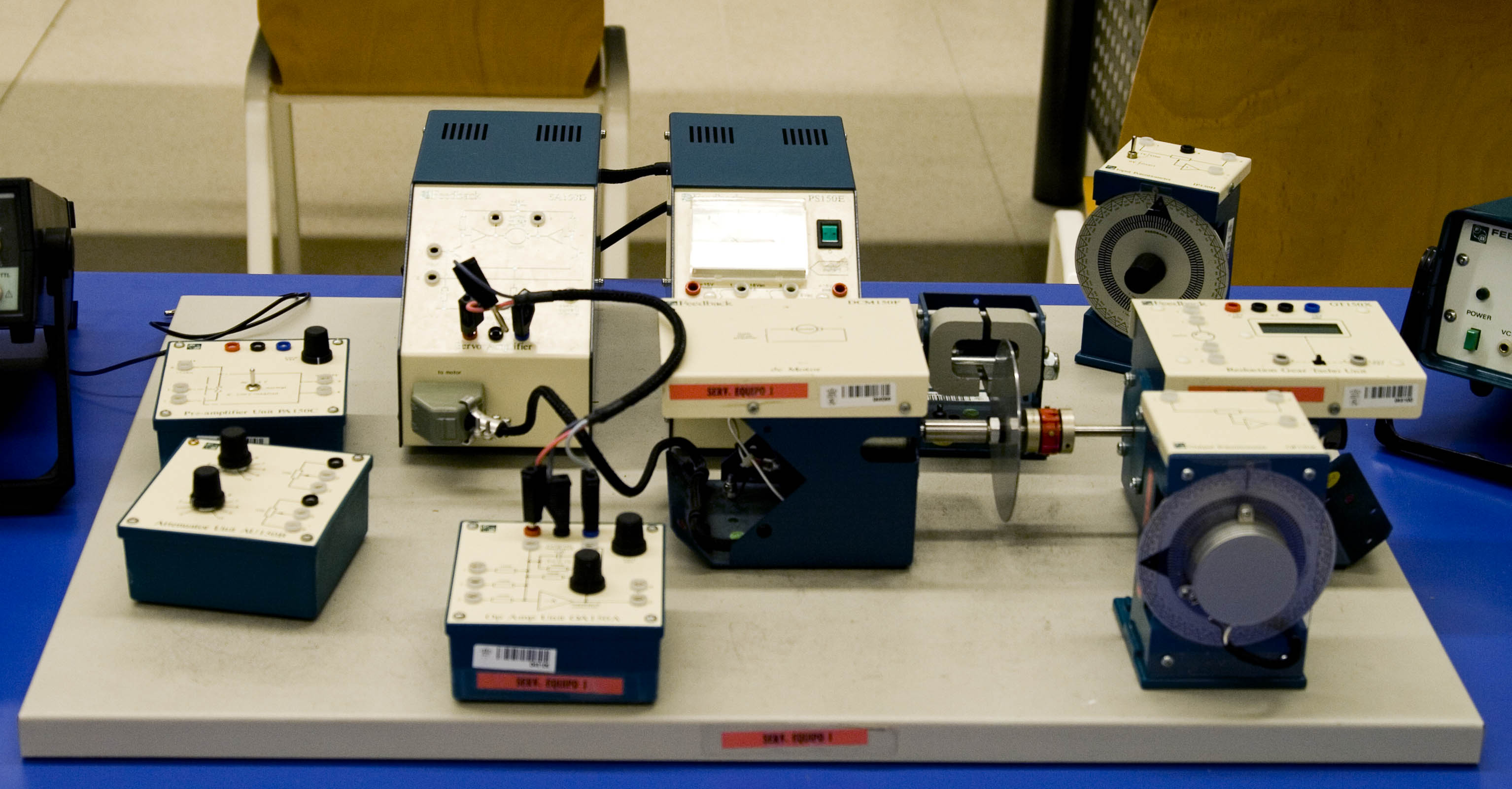 | Universidad: Universidad de León Descripción: Se trata de un entrenador para prácticas que permite realizar control de velocidad y posición de un motor de corriente continua y cuyo eje está extendido para montaje directo de freno magnético y discos de inercia. El entrenador está formado por los siguientes módulos: Fabricante: Feedback Instruments Limited Guiones Prácticas: Enlace Temas: Control Clásico |
Kit PLC CQM1 y Display NT20S | |
 | Universidad: Universidad de Alicante Descripción: Kit de evaluación del clásico PLC de Omrom, con display tactil además de los interruptores para conectar a las entradas digitales y de una fuente regulable para las entradas analógicas. El display se conecta via RS-232 con el PLC. Fabricante: Omron Temas: Automatización, Fabricación |
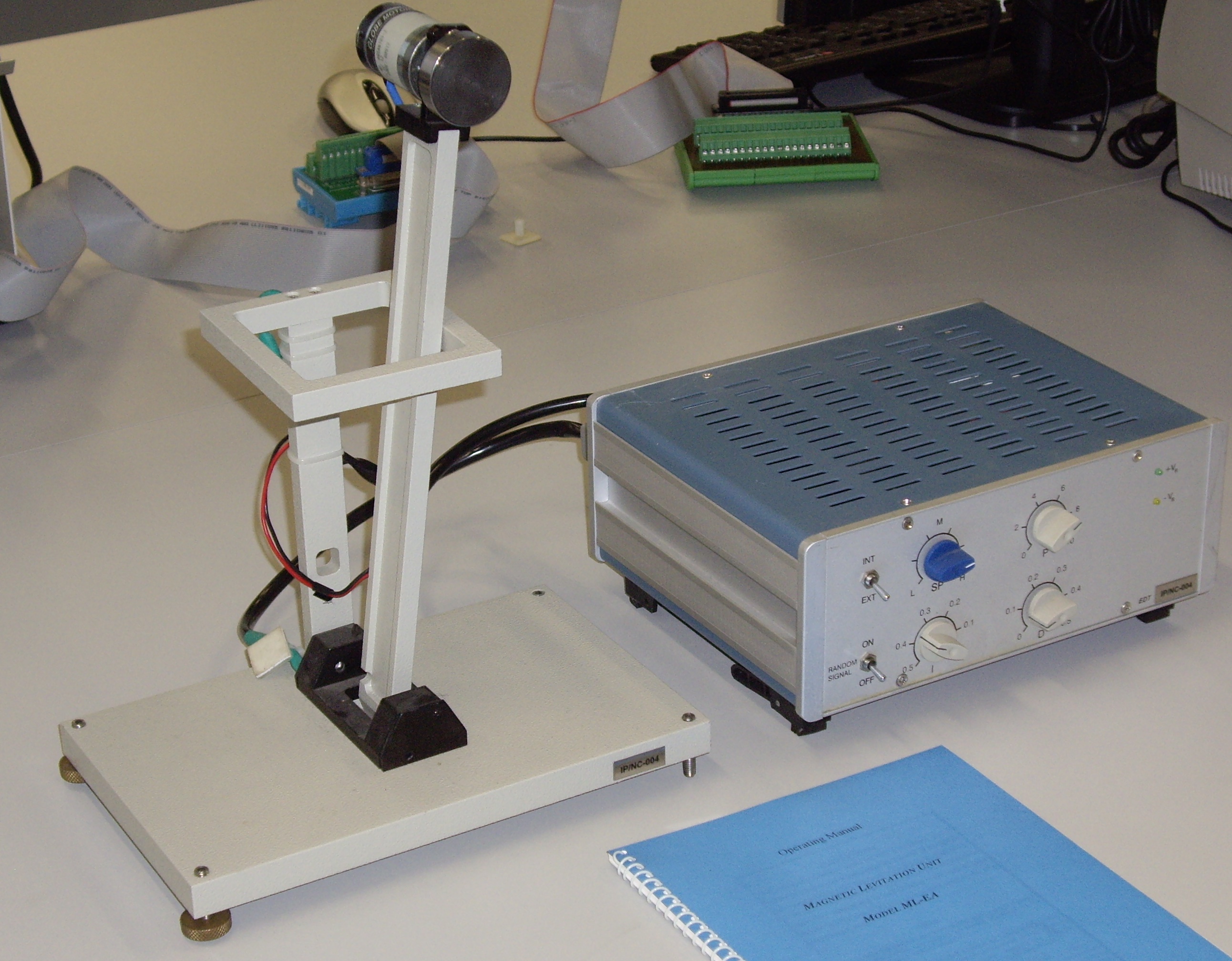
Levitador Magnetico | |
 | Universidad: Universidad Miguel Hernández Descripción: Sistema físico constituido por un levitador magnético. El equipo integra una unidad de señal y control mediante PID. Fabricante: Guiones Prácticas: Enlace Temas: Control Clásico, Simulación |
Levitador Magnético Model 730 | |
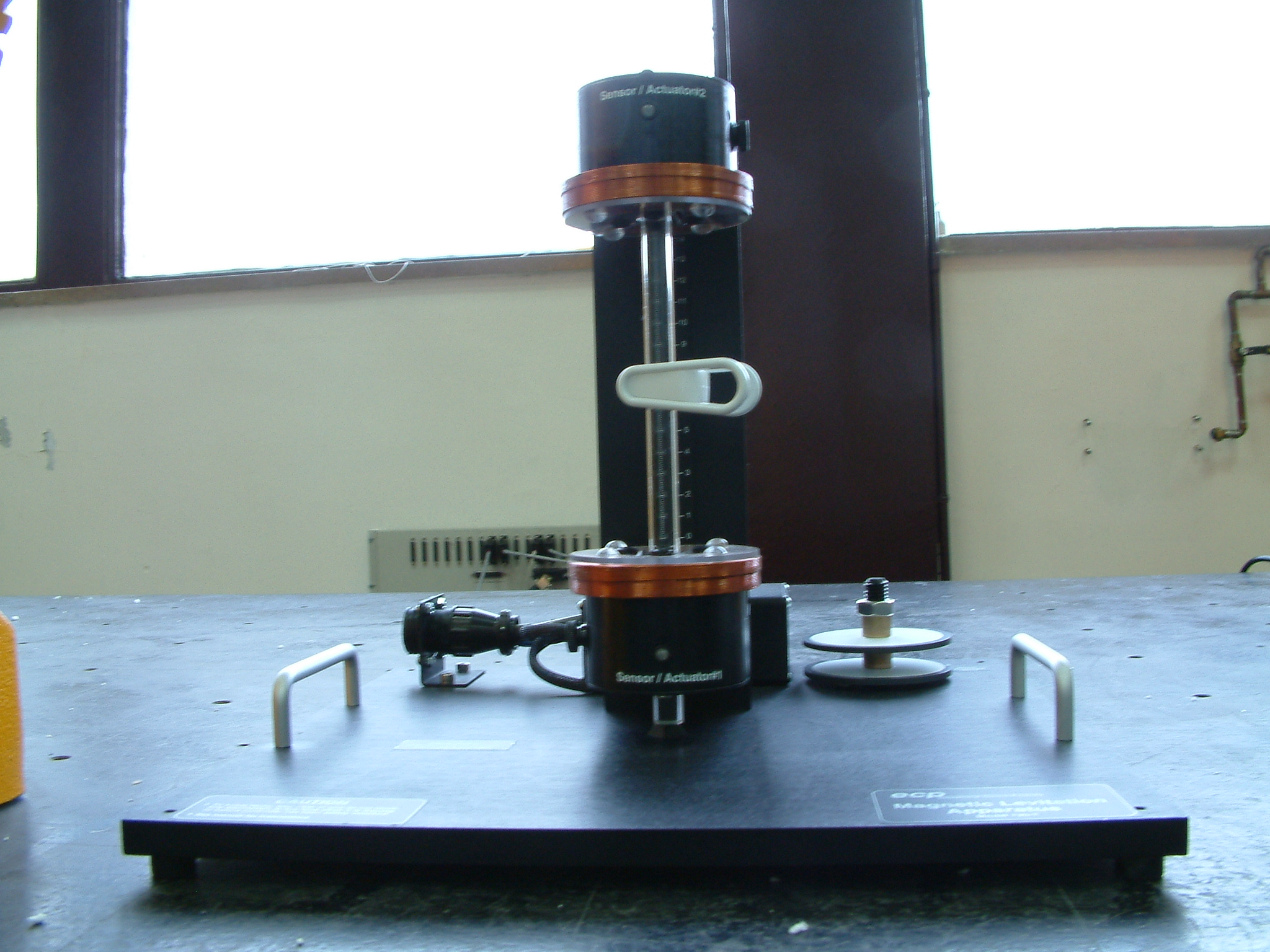 | Universidad: Universidad Politécnica de Cataluña Descripción: Levitador magnético usado en proyectos final de carrera para control no lineal con dinámica rápida Fabricante: ECP Temas: Control Avanzado |
Maqueta 4 variables de control | |
 | Universidad: Universidad de León Descripción: Maqueta industrial multifuncional que permite la realización de actividades de automatización y control sobre 4 variables: presión, temperatura, caudal y nivel. Fabricante: Instituto de Automática y Fabricación de la Universidad de León Guiones Prácticas: Enlace Temas: Control Avanzado, Control Clásico, Control Multivariable |
Maqueta multivariable de control de nivel | |
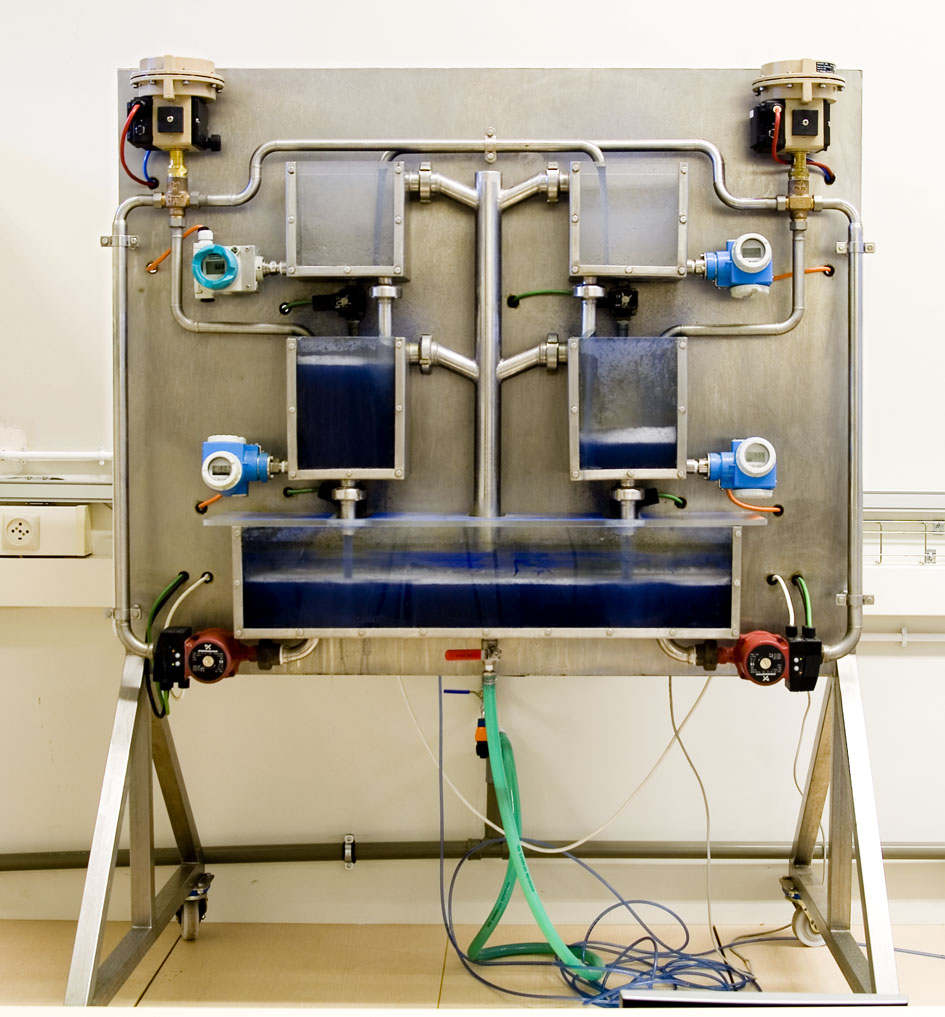 | Universidad: Universidad de León Descripción: Maqueta industrial de cuatro tanques que implementa el proceso propuesto por Karl Henrik Johansson (The QuadrupleTank Process: A Multivariable Laboratory Process with an Adjustable Zero. IEEE Transaction on Control Systems Technology, 8(3):456465, 2000). Este modelo, diseñado para mostrar los problemas provocados por la posición de los ceros en sistemas de control multivariable, está compuesto por dos bombas y cuatro tanques interconectados de tal manera que los dos tanques superiores desaguan en los inferiores. La maqueta mantiene la estructura original, pero se ha construido con instrumentación industrial común. Fabricante: Instituto de Automática y Fabricación de la Universidad de León Guiones Prácticas: Enlace Temas: Control Avanzado, Control Clásico, Control Multivariable |
Maquetas Célula Fabricación Festo | |
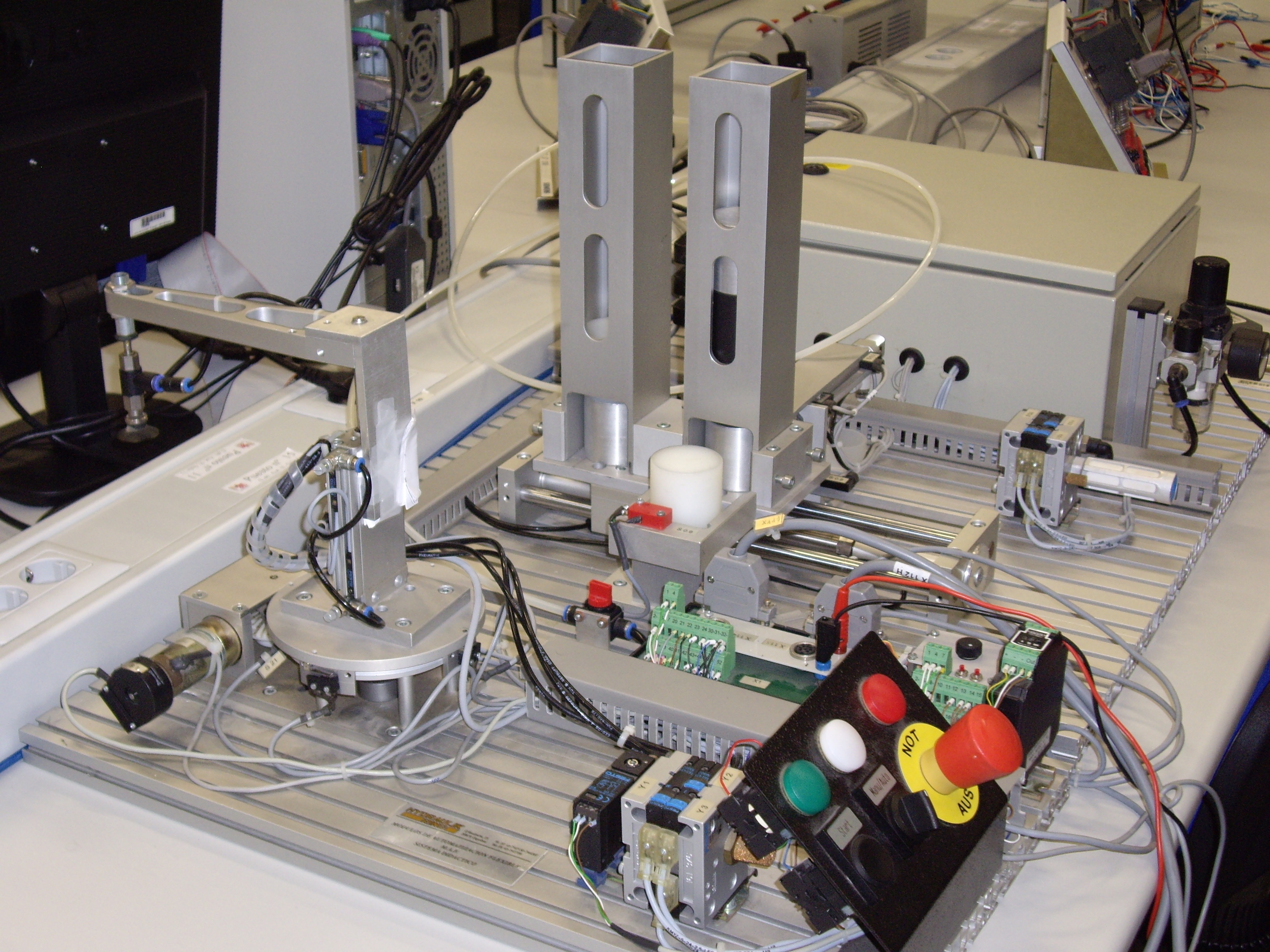 | Universidad: Universidad Miguel Hernández Descripción: Maquetas de un proceso de fabricación formada por varios módulos electroneumáticos: Fabricante: Festo Didactic Guiones Prácticas: Enlace Temas: Automatización |
Microcontrolador EasyPic 4 | |
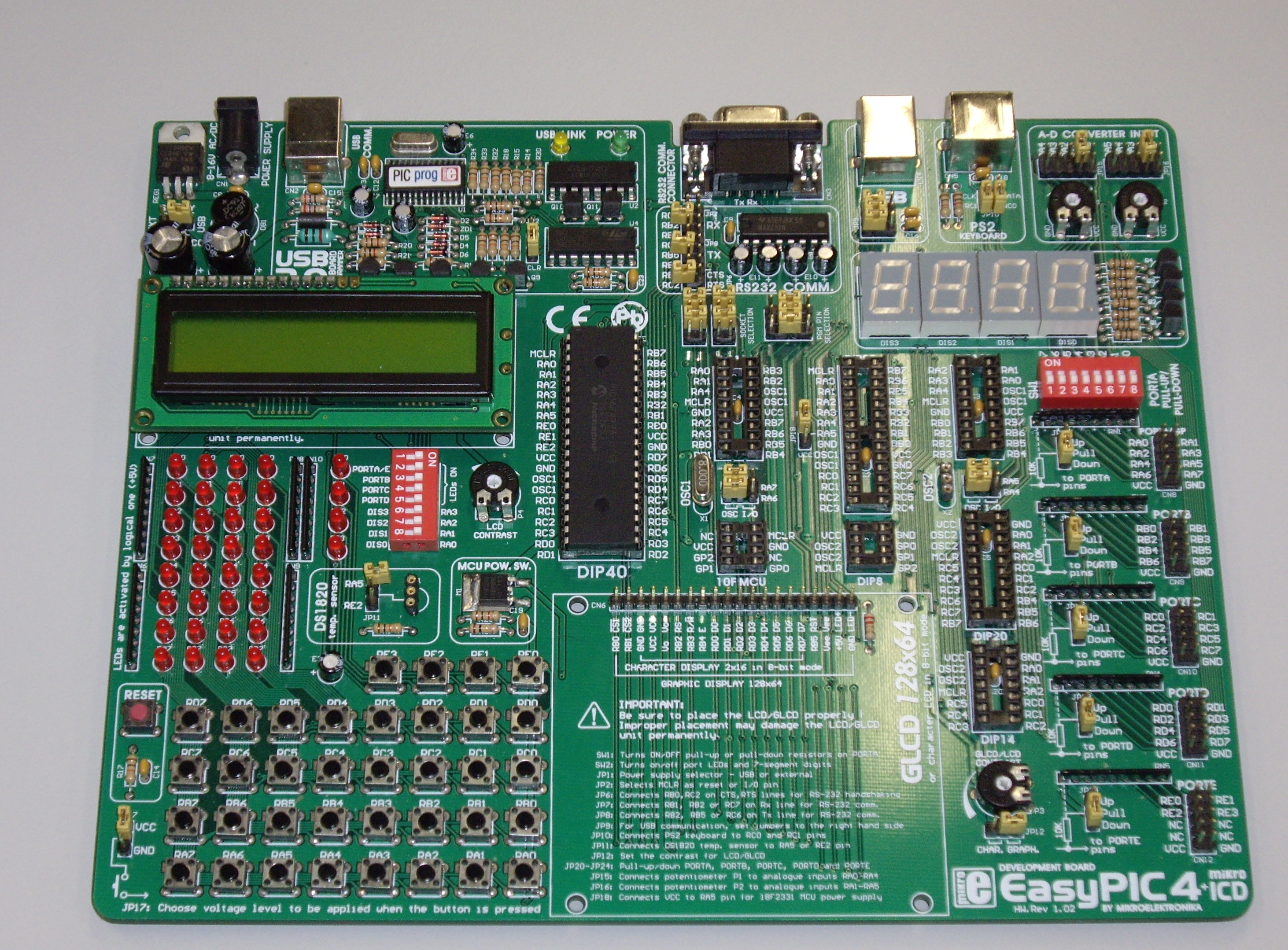 | Universidad: Universidad Miguel Hernández Descripción: Tarjeta de entrenamiento para el conocido microcontrolador PIC de la empresa Microchip. Fabricante: MikroElektronica Guiones Prácticas: Enlace Temas: Automatización |
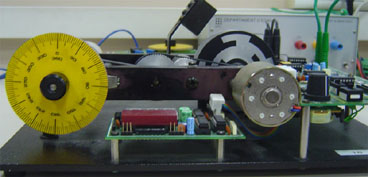
Motor CC (Feedback 33-002) | |
 | Universidad: Universidad Miguel Hernández Descripción: Maqueta de laboratorio integrada por un motor de corriente contínua lineal, amplificador de potencia, reductora y freno magnético. Está equipada con sensores de velocidad (tacómetro) y posición (encoder absoluto, encoder incremental y potenciómetro analógico). Fabricante: Feedback Instruments Limited Guiones Prácticas: Enlace Temas: Control Avanzado, Control Clásico, Control Estocástico |
Péndulo Invertido | |
 | Universidad: Universidad Miguel Hernández Descripción: Sistema físico constituido por un péndulo invertido con un motor DC y una disco de inercia en un extremo. El equipo integra una unidad de señal y control mediante PID. Fabricante: Temas: Control Clásico, Simulación |
Process Trainer PT326 (Temperatura) | |
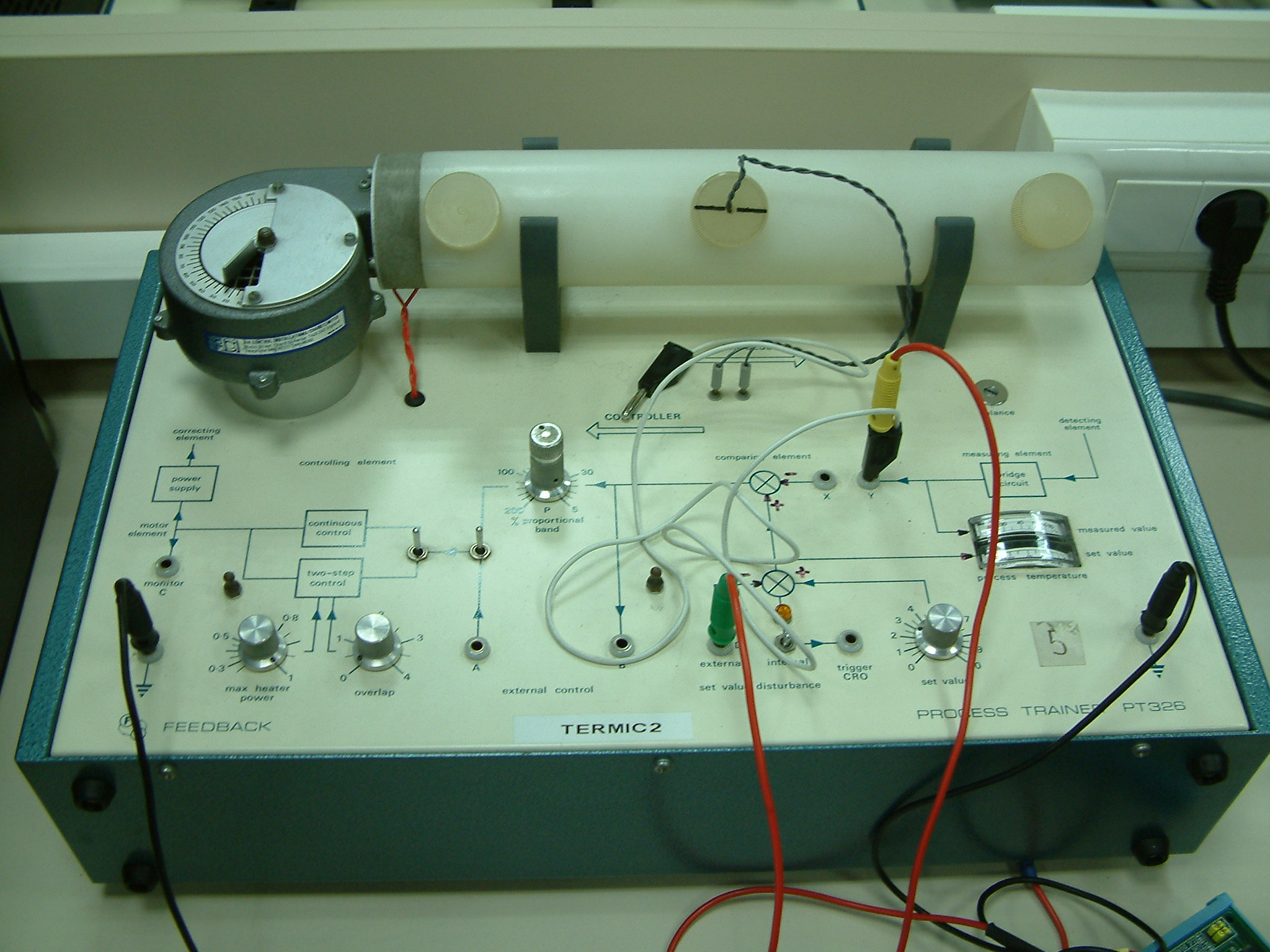 | Universidad: Universidad Politécnica de Cataluña Descripción: Control de temperatura de flujo de aire caliente: Control lineal, Dinámicas lentas, Control de temperatura, Sistemas con retardo. Fabricante: Feedback Temas: Control Avanzado, Control Clásico |
Robot ABB IRB 140 | |
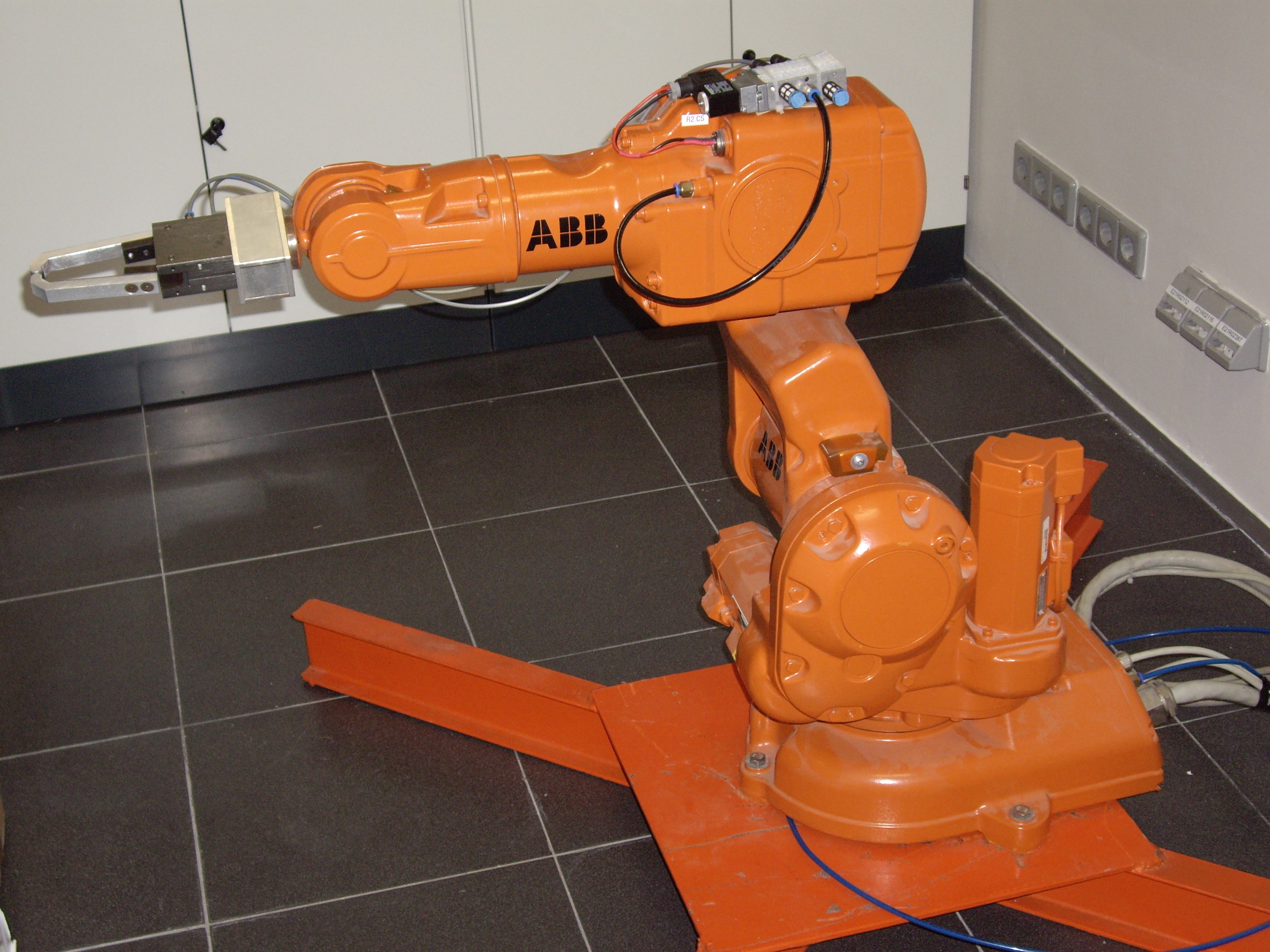 | Universidad: Universidad Miguel Hernández Descripción: Robot insdustrial ABB con seis grados de libertad y 6 Kg de capacidad de carga Fabricante: ABB Guiones Prácticas: Enlace Temas: Robótica |
Robot Eyebot | |
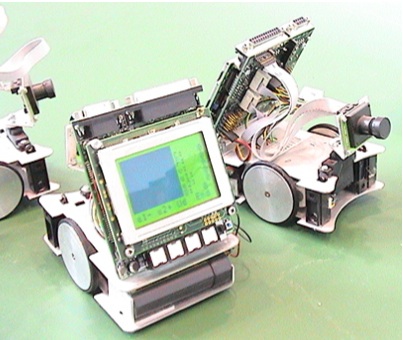 | Universidad: Universidad Miguel Hernández Descripción: Se trata de un robot basado en la tarjeta Eyebot basada en el microcontrolador Motorota 68332, diseñado originalmente en la Universidad de Perth (Australia) para participar en la competición oficial de la RoboCup. El robot está constituido por: Fabricante: Universidad de Perth (Australia). Distribuidor Androtec Guiones Prácticas: Enlace Temas: Robótica Móvil, Sistemas de Tiempo Real |
Robot Rugwarrior | |
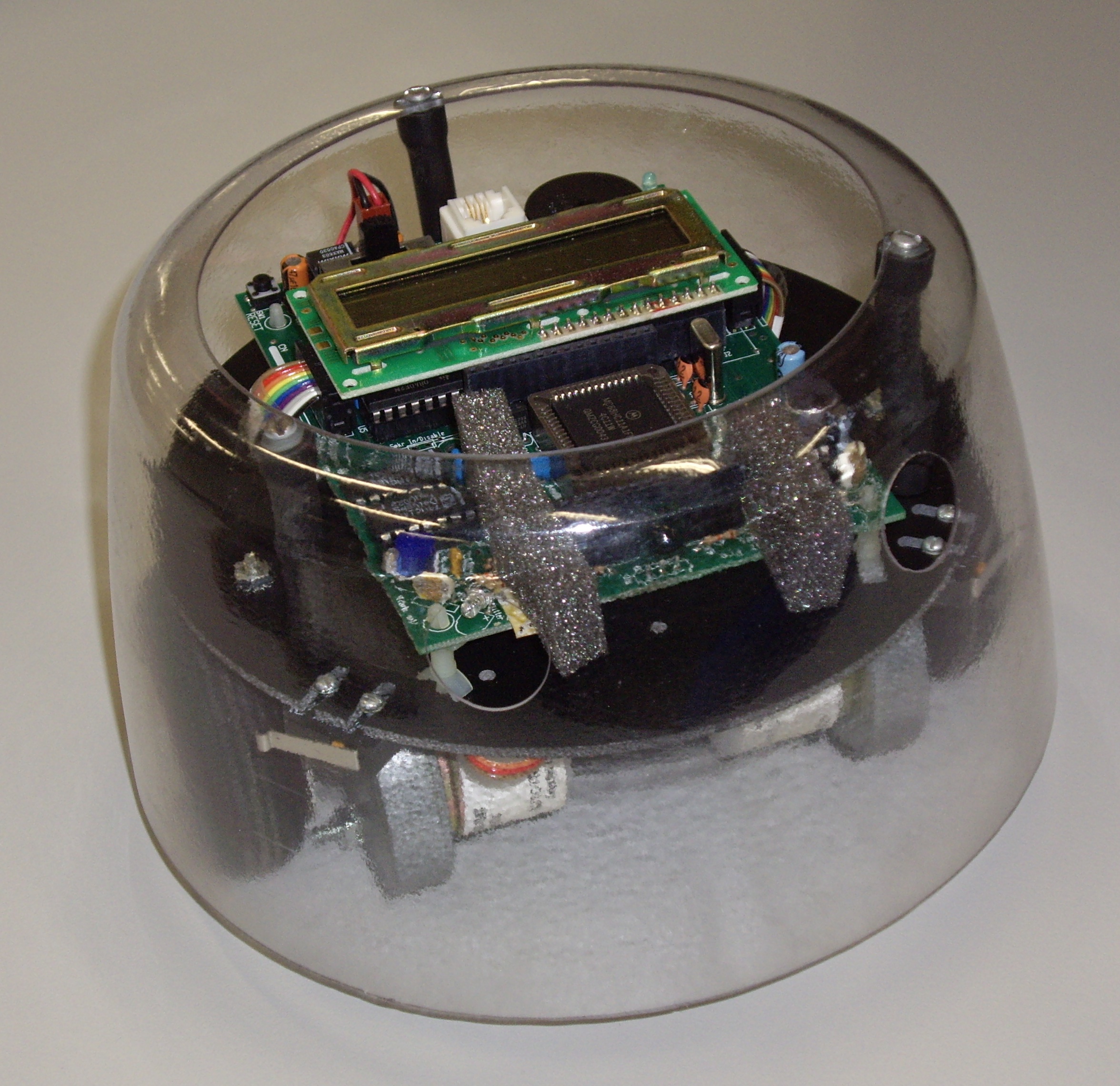 | Universidad: Universidad Miguel Hernández Descripción: El RugWarrior Pro es un pequeño robot educacional basado en el microcontrolador Motorla 68HC11. Presentado en el libro de Joseph Jones y Anita Flyn Mobile Robots: Inspiration to Implementation como un ejercicio práctico de integración de las tecnologías asociadas al diseño de robots de forma asequible, y fácilmente reproducible. Fabricante: Guiones Prácticas: Enlace Temas: Robótica Móvil, Sistemas de Tiempo Real |
Robot Wifibot | |
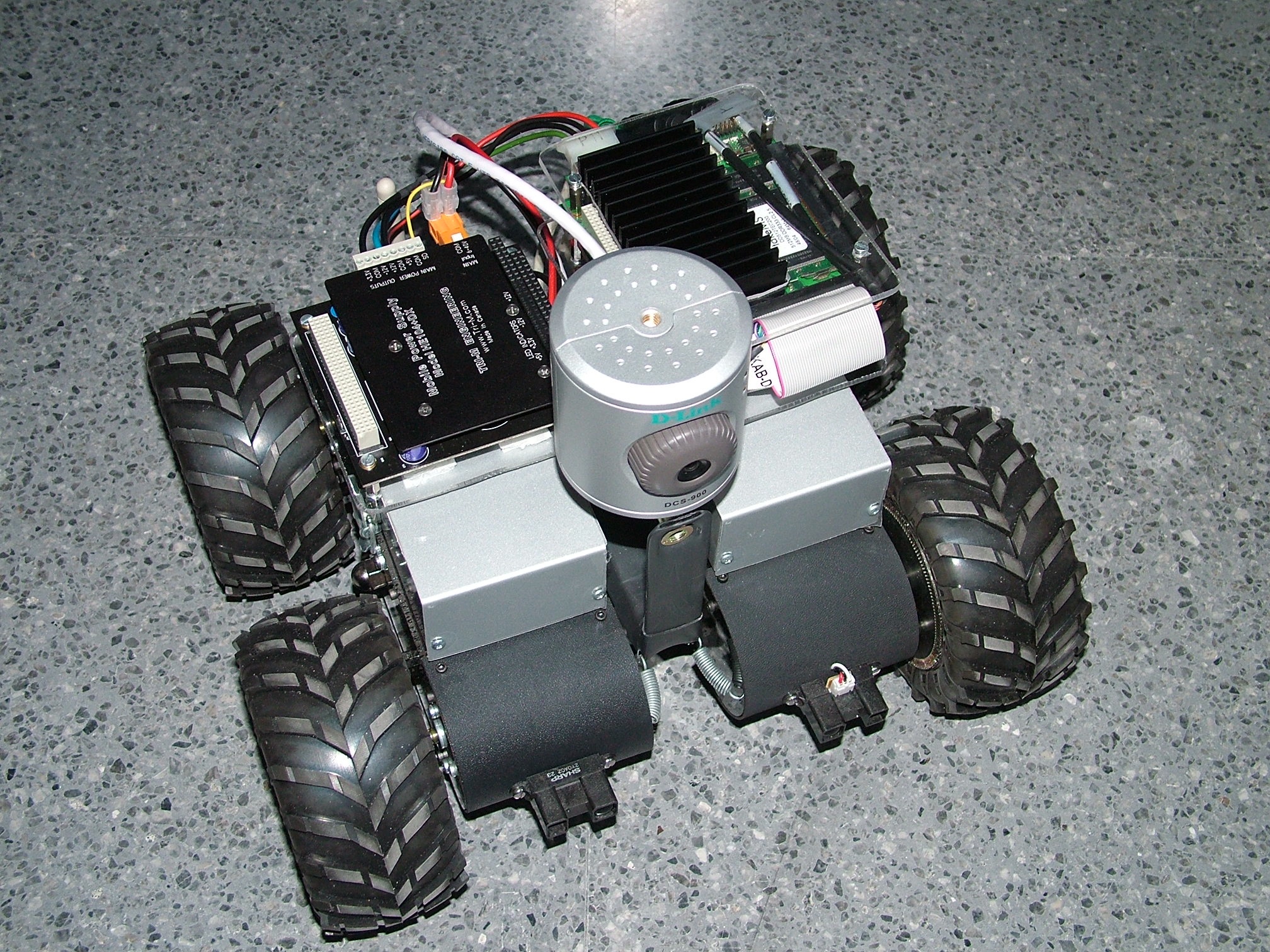 | Universidad: Universidad Miguel Hernández Descripción: Wifibot es un robot compacto de 4 ruedas con conexión wifi. Está equipado con un microcontrolador (AMD Au1500 400 MHz 64 MB RAM, 32 MB Flash) con S.O. linux. Dispone se sensores IR de distancia, y una cámara de red. Fabricante: WIFIBOT Networked Robotics Temas: Robótica Móvil |
Robots Móviles Pioneer 3-AT | |
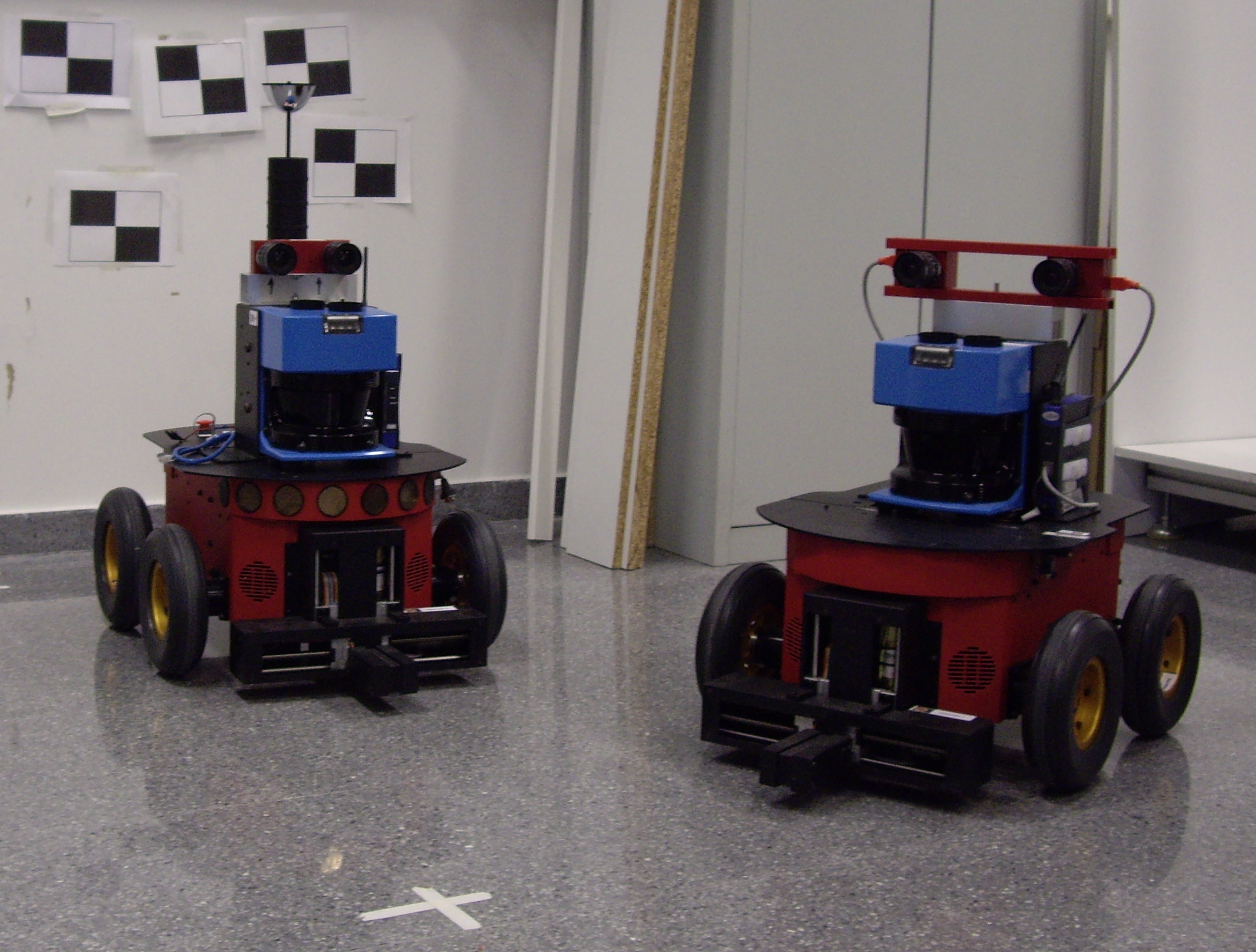 | Universidad: Universidad Miguel Hernández Descripción: Robot móvil con cuatro ruedas, CPU embarcada (intel Pentium M) y S.O linux y conexión wifi. Puede llevar una carga de hasta 30 Kg. Está equipado con sensores de rango laser, ultrasonidos, cámara estéro, cámara omnidireccional, pinza. Programación basada en la librería de control de robots ARIA. Fabricante: Mobile Robots Temas: Robótica Móvil, Visión por Computador |
Scorbot ER-IX | |
 | Universidad: Universidad de Alicante Descripción: Brazo robot de 5 grados de libertad con una herramienta de pinza. El controlador también dispone de E/S para controlar otros elementos (mesa, cinta, sensores...) Fabricante: Eshed Rototec (STI) Temas: Simulación, Robótica, Automatización |
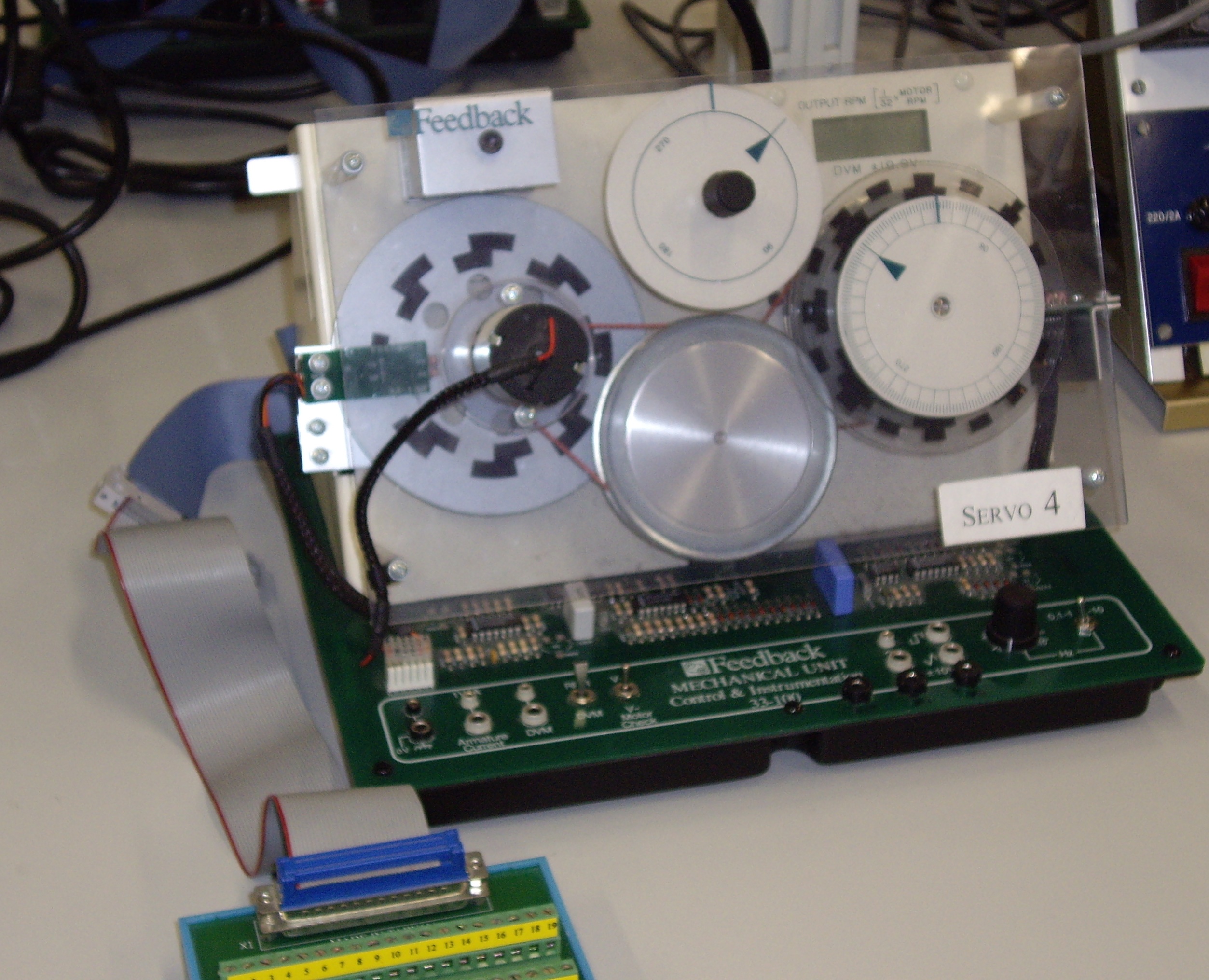
Servo 33-100 | |
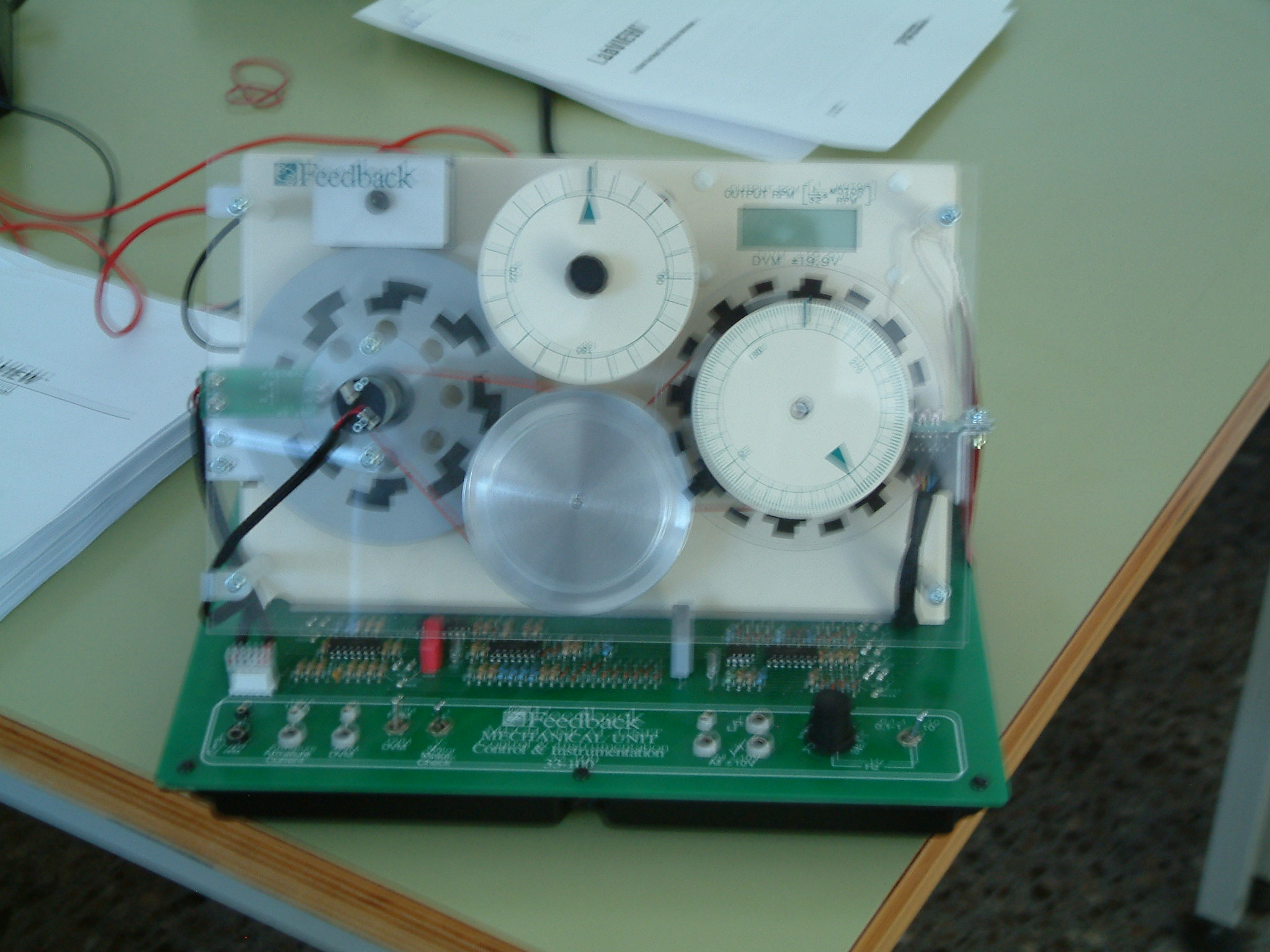 | Universidad: Universidad Politécnica de Cataluña Descripción: Maqueta de laboratorio integrada por un motor de corriente contínua lineal, amplificador de potencia, reductora y freno magnético. Está equipada con sensores de velocidad (tacómetro) y posición (encoder absoluto, encoder incremental y potenciómetro analógico). Temas: Control Avanzado, Control Clásico |
Servo de Corriente Continua | |
 | Universidad: Universidad Politécnica de Cataluña Descripción: MS15 DC motor control module: Fabricante: LJ Systems Guiones Prácticas: Enlace Temas: Control Avanzado, Control Clásico, Control Digital |
Simulador de Procesos | |
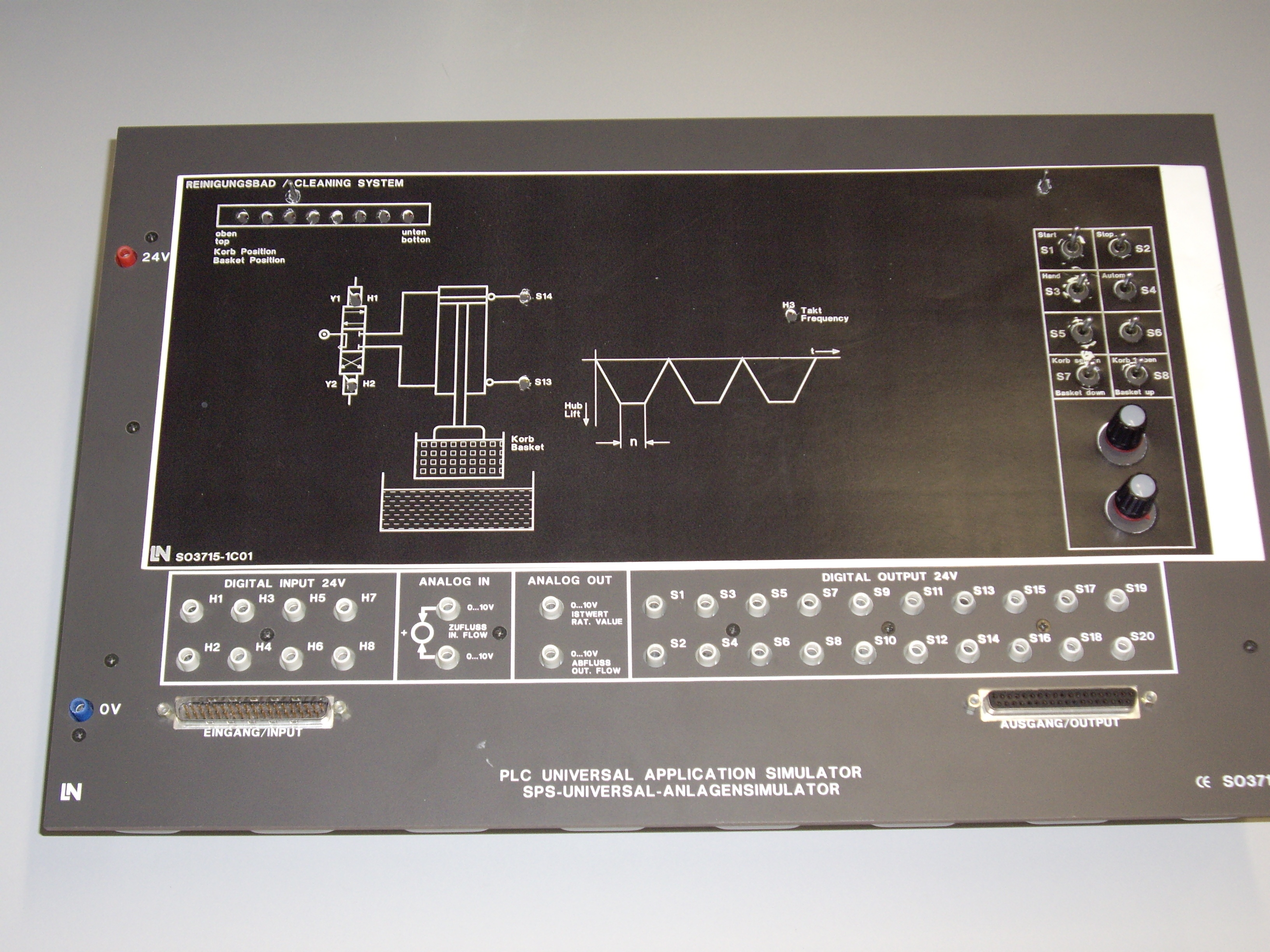 | Universidad: Universidad Miguel Hernández Descripción: Simulador de procesos para control mediante PLCs. Utiliza un panel con una carátula intercambiable, luces y palancas. Se conecta directamente al PLC o a un PC disponiendo de un software de simulación para ejecutar programas realizafos en Step-7. Fabricante: Guiones Prácticas: Enlace Temas: Automatización |
Sistema Varianción Velocidad | |
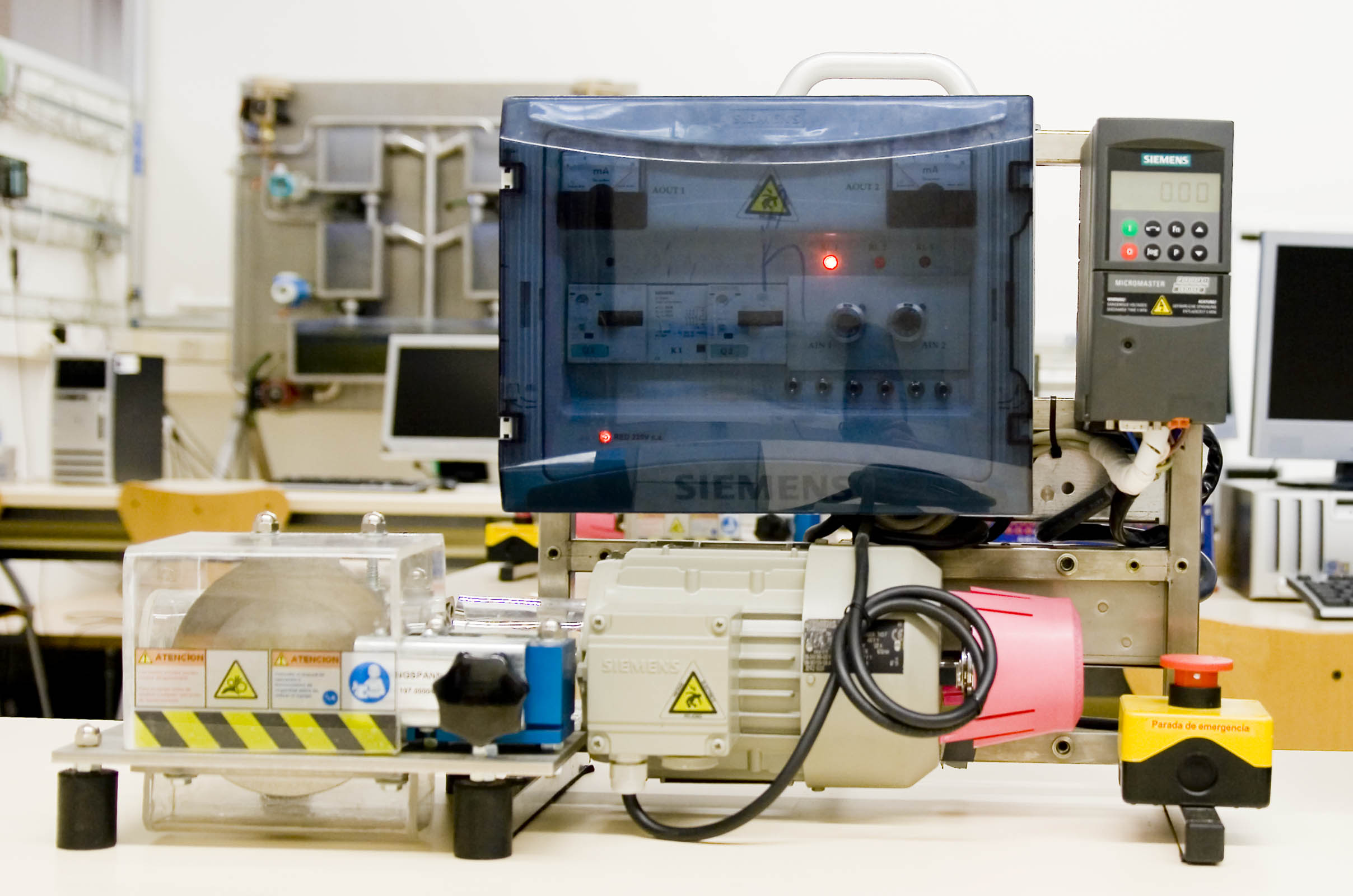 | Universidad: Universidad de León Descripción: Las estaciones están formadas por un convertidor de frecuencia (Micromaster Vector 440 0.12 kW-250 kW), un motor de 230/400 V con una potencia de 0.37kW y 1370 r.p.m. y un sistema de frenado con discos de inercia, y un panel de operación al que están cableadas las entradas y salidas del variador. Cada convertidor de frecuencia dispone de una tarjeta profibus DP que le convierte en subordinado de un Autómata Programable Simatic S7 314 2DP. El Autómata Programable está configurado con una tarjeta Ethernet para el acceso externo y contiene un entorno Web, que simula el interfaz entrenador. Fabricante: Siemens Guiones Prácticas: Enlace Temas: Control Avanzado |
Tarjeta microcontrolador Arduino | |
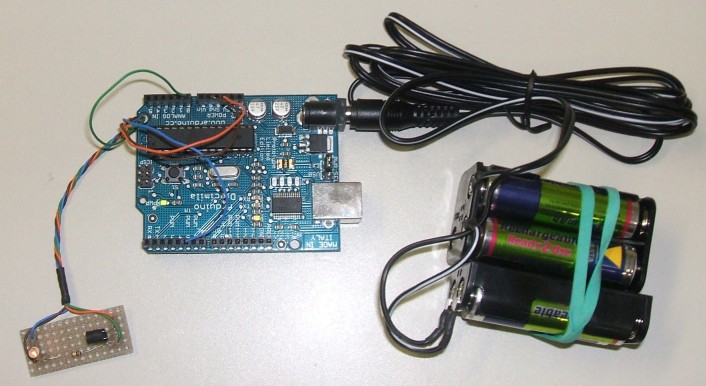 | Universidad: Universidad de Alicante Descripción: La tarjeta controladora Arduino destaca principalmente por tres aspectos. Primero por la cantidad de documentación y recursos que ofrece su web. Segundo por su facilidad de programación en C/C++ gracias a un entorno muy facil de utilizar. Y tercero, por su conexión al PC mediante USB, conexión que también se puede usar para alimentar la tarjeta. Muy económico. Fabricante: SmartProjects, Libelium y otros Temas: Automatización, Fabricación, Robótica, Robótica Móvil, Sistemas de Tiempo Real |
Twin Rotor MIMO System 33-007 | |
 | Universidad: Universidad Politécnica de Cataluña Descripción: Maqueta con doble rotor: Control Multivariable, Linealización por realimentación Fabricante: Feedback Temas: Control Avanzado, Control Multivariable |