![]()

Omnidirectional images database
THE DATABASE
PUBLICATIONS
VISIT ALSO
Introduction
Quorum V is a set of omnidirectional images captured in an indoors environment (Quorum V building, 2nd floor) at Miguel Hernandez University, Spain. This database is intended to test visual mapping and localization algoritmhs for mobile robots.
The database has been referenced in the following papers:
- Performance of Global-Appearance Descriptors in Map Building and Localization Using Omnidirectional Vision
L. Payá accue, F. Amorós, L. Fernández, O. Reinoso
Sensors. Vol. 14, pp. 3033-3064. (February 2014).
Ed. MDPI. ISSN:1424-8220. DOI: 10.3390/s140203033
The database includes a corridor, three offices, a library and an events room. It is composed of two sets of images.
- Set 1: Training set. It is composed of 872 omnidirectional color images which have been captured on a dense regular 40x40 cm. grid of points.
- Set 2: Test set. It is composed of 546 images captured in all the rooms, in some half-way points among the grid points and with different orientations and times of day.
The next figure shows a bird eye's view of the grid points where the robot captured the training set.
 |
Room 1: Corridor. 212 images. Room 2: Office A. 35 images. Room 3: Office B. 72 images. Room 4: Office C. 84 images. Room 5: Library. 169 images. Room 6: Events room. 300 images. |
The database
The whole database is downloadable through the next links:
| Quorum V database | ||
| Training set | Omnidirectional images | Panoramic images |
| Test set | Omnidirectional images | Panoramic images |
The database was captured with an Imaging Source DFK 21BF04 camera, which takes pictures of a hyperbolic mirror (Eizoh Wide 70). The mirror is mounted over the camera, with its axis aligned with the camera optic axis. Both the original omnidirectional images, and the panormic images (cylindrical projection) can be downloaded.
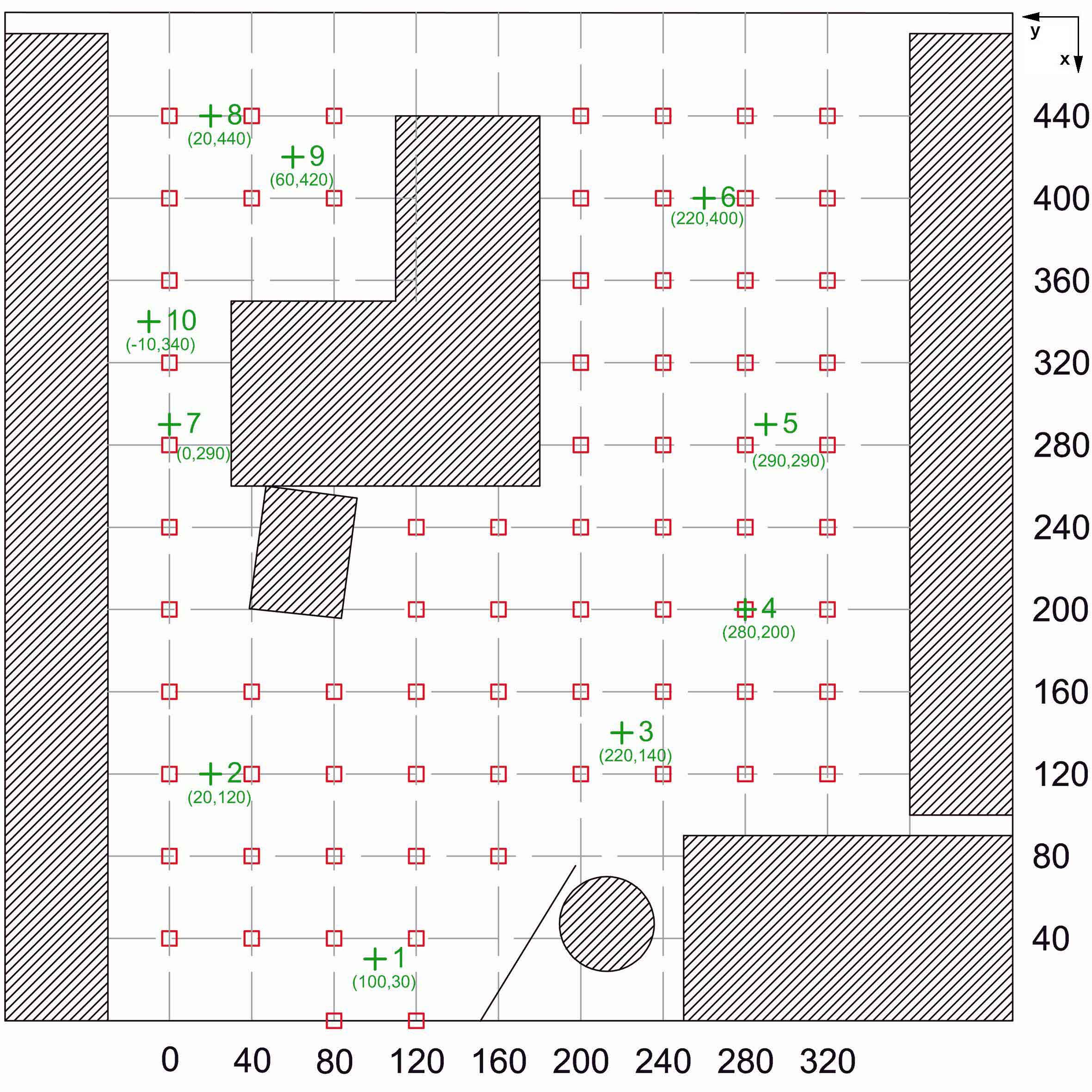
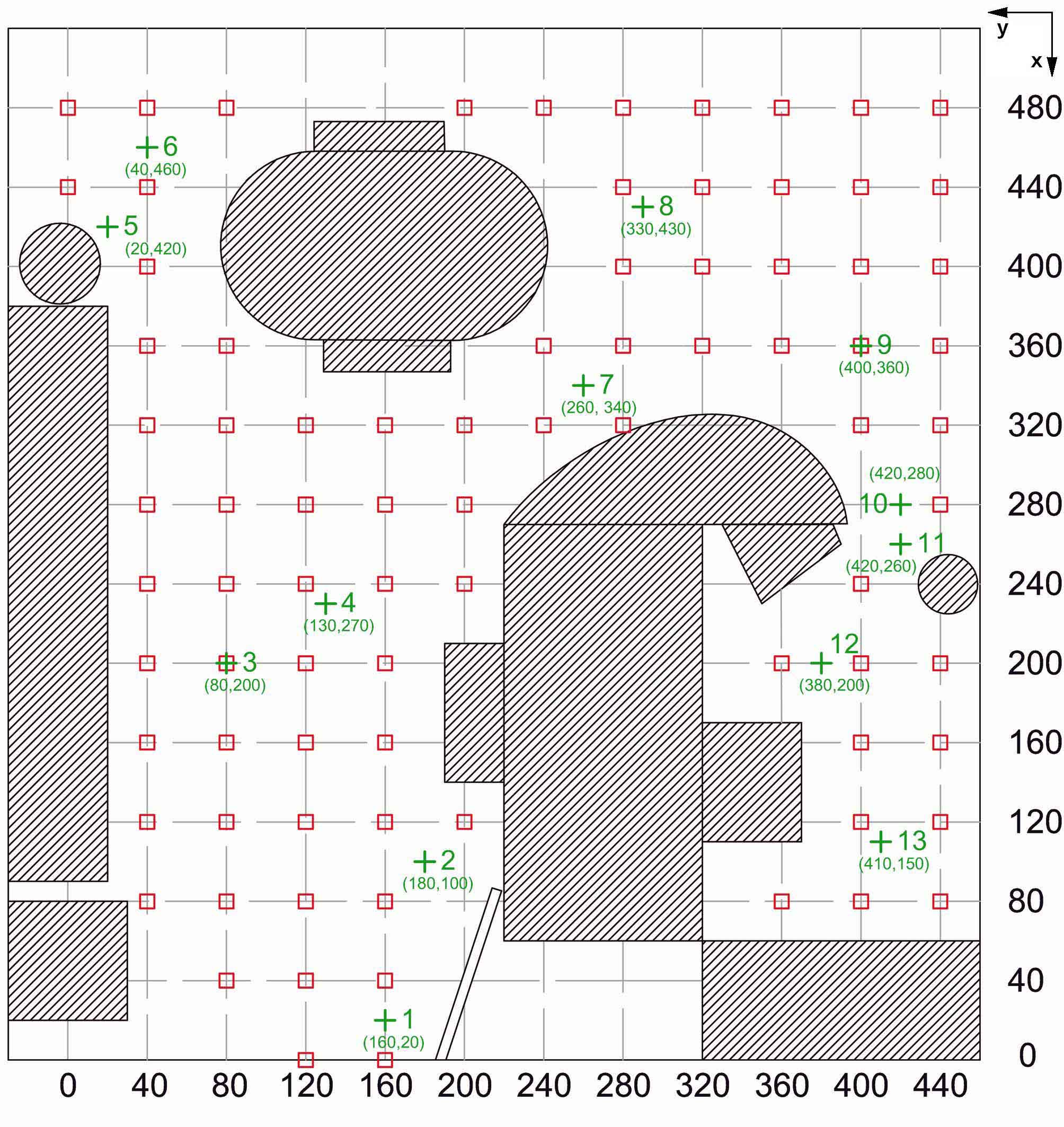
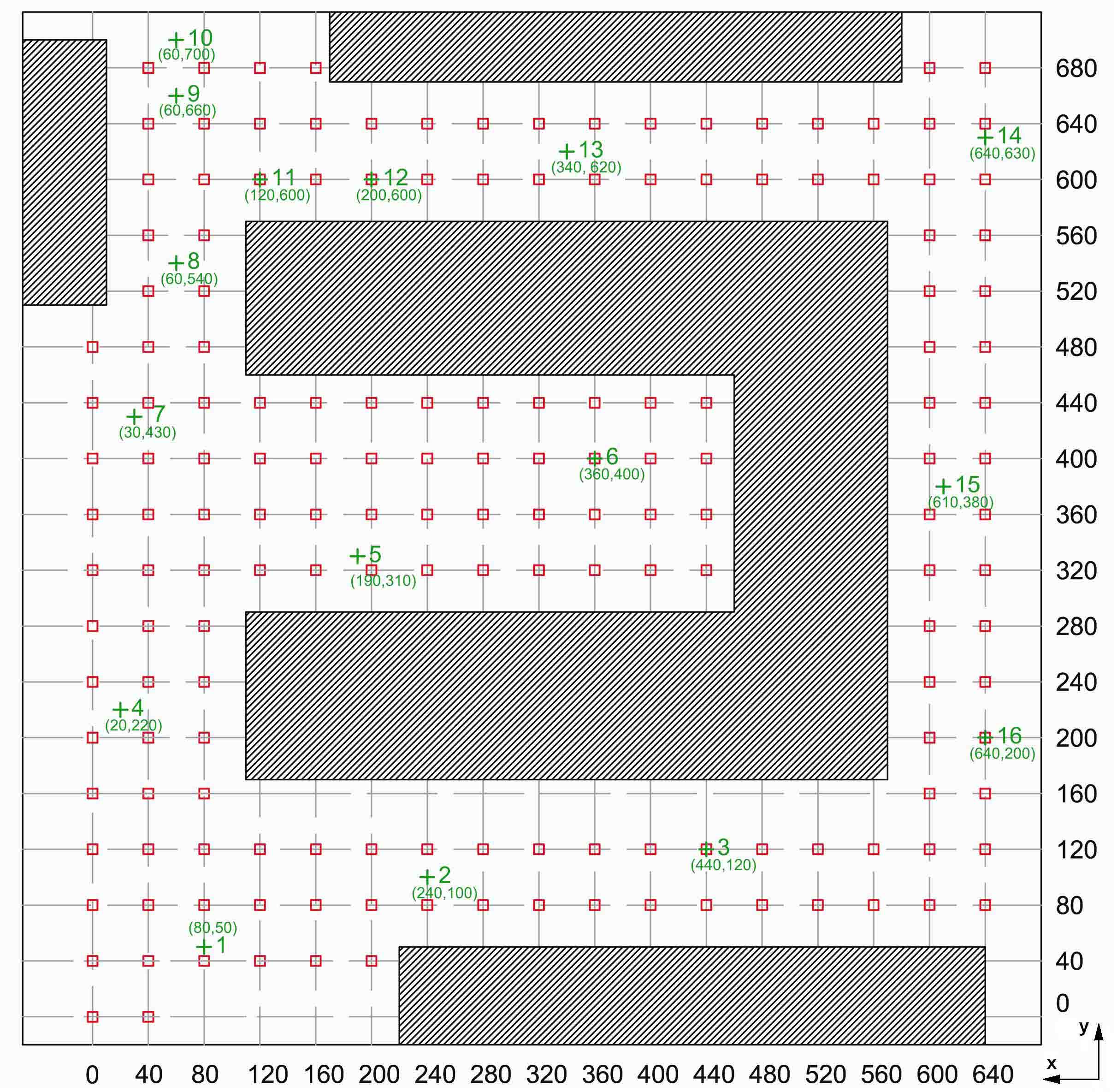
The next figures shows a bird eye's view of each room. The coordinates where each image was captured are shown. Red squares are the positions where training images were captured and green crosses the positions of test images. On each green cross, 16 test images were captured, with different orientations (every 22.5 deg). The name of the training images contains the coordinates of the capture points (cm) and the name of the test images contains the coordinates and the orientation of the camera (deg).
Room 1: Corridor |
Room 6: Events room |
|
|
 |
|
Room 2: Office A |
Room 3: Office B |
|
|
 |
|
Room 4: Office C |
Room 5: Library |
|
 |
 |
Publications
- Performance of Global-Appearance Descriptors in Map Building and Localization Using Omnidirectional Vision
L. Payá accue, F. Amorós, L. Fernández, O. Reinoso
Sensors. Vol. 14, pp. 3033-3064. (February 2014).
Ed. MDPI. ISSN:1424-8220. DOI: 10.3390/s140203033
Visit also
- ARVC (Automation, Robotics and Computer Vision group): Visit our research group.