![]()

PaRoLa - Parallel Robotics Laboratory
Introduction
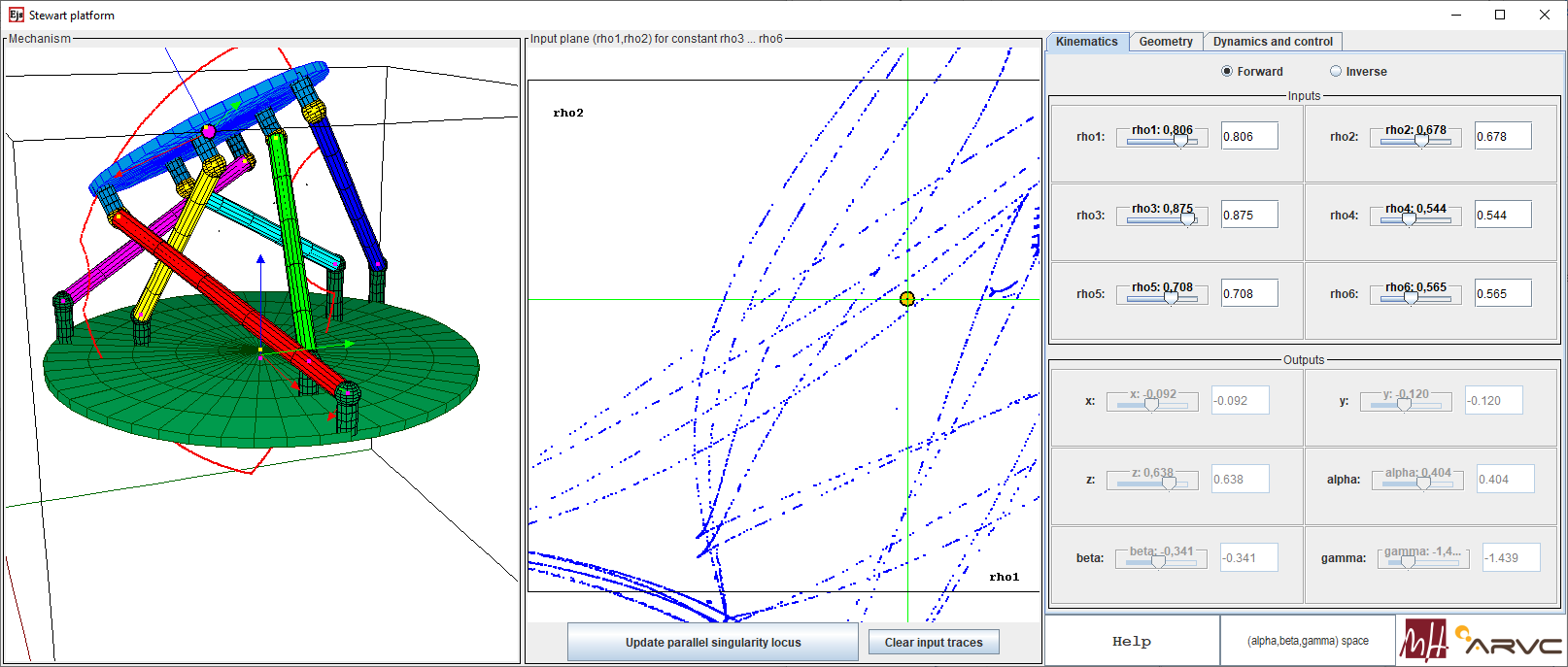
PaRoLa is a virtual laboratory for simulating the kinematics and control of closed-chain mechanisms, especially parallel robots. Its features include:
- Simulation of the direct and inverse kinematic problems
- Visualization of the singularities and workspace of the mechanisms
- Possibility of changing the design parameters of the mechanisms and see its effect on kinematics
- Simulation of the closed-loop control of the mechanisms
- Graphical animation of the simulated mechanisms and high degree of interactivity
Implemented mechanisms
To use PaRoLa, you may need to install or update Java Runtime Environment in your computer (https://www.java.com/download/).
After that, you can download a Java applet (.jar file) and directly run it, for each of the following mechanisms:
- Mechanisms with 1 degree of freedom:
- Manipulators with 2 degrees of freedom:
- Manipulators with 3 degrees of freedom:
- Delta parallel robot
- UPSRRR
- 3RPR
- 3RRR
- 3UPS-PU (Tricept-like)
- Manipulators with 6 degrees of freedom:
- 6UPS (Stewart platform)
Authors and License
PaRoLa has been created by Adrian Peidro and the members of the Automation, Robotics and Computer Vision Lab at Miguel Hernandez University (Spain)
Contact: Dr. Adrian Peidro (apeidro at umh.es)
Java applets created with Easy Java Simulations

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Visit also
- ARVC (Automation, Robotics and Computer Vision group): Visit our research group.
- ARTE (A Robotics Toolbox for Education): ARTE allows you to simulate any industrial serial robotic arm with realistic graphics inside Matlab.