

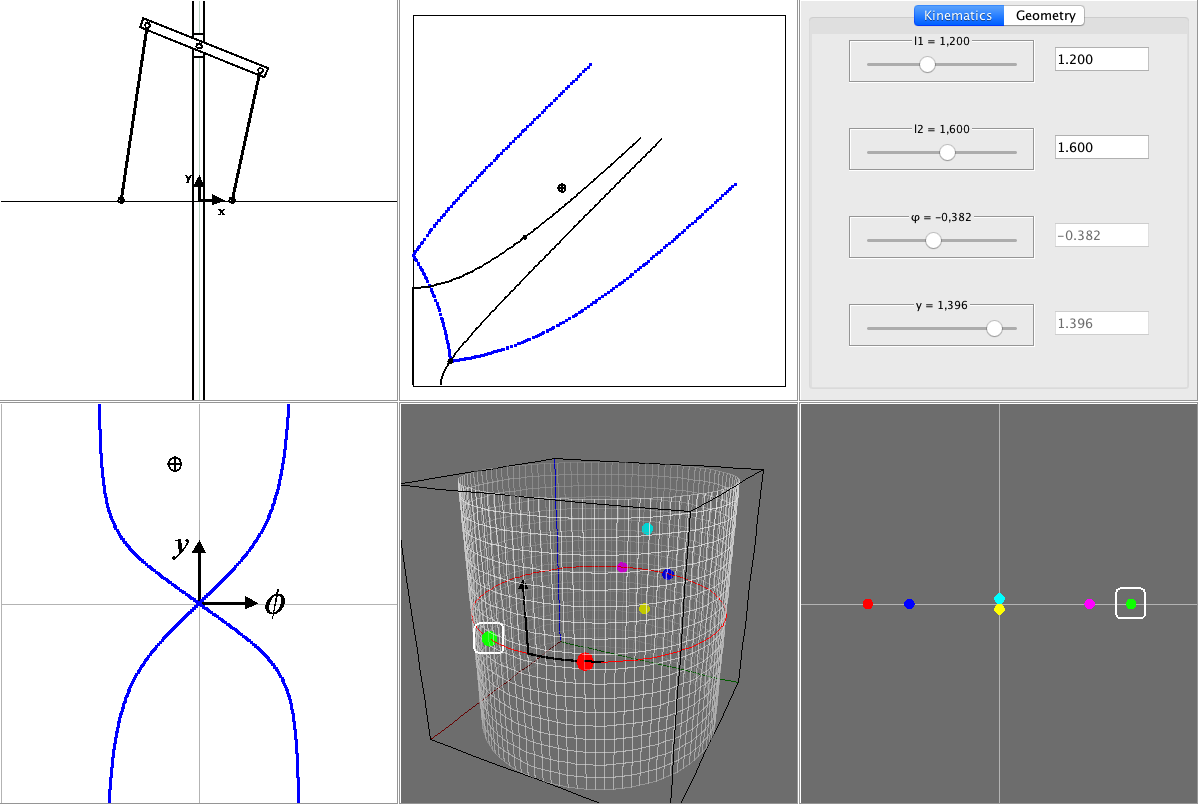
You can simulate the forward kinematics of an analytic 2RPR-PR robot downloading the following Java applet (you may need the latest version of Java):
 |
 |
This analytic 2RPR-PR robot can execute nonsingular transitions by encircling quadruple solutions of the forward kinematic problem.
For further information, see the following publications:
You can see the 2RPR-PR robot performing nonsingular transitions in the following video:
The analytic 3RPR robot with flat base and platform (also known as the planar Stewart platform) can also perform nonsingular transitions in a similar way: