![]()

The ARVC Outdoor Dataset
DETAILS
DOWNLOAD
GENERATE PANORAMIC IMAGES
CITATION
VISIT ALSO
OVERVIEW
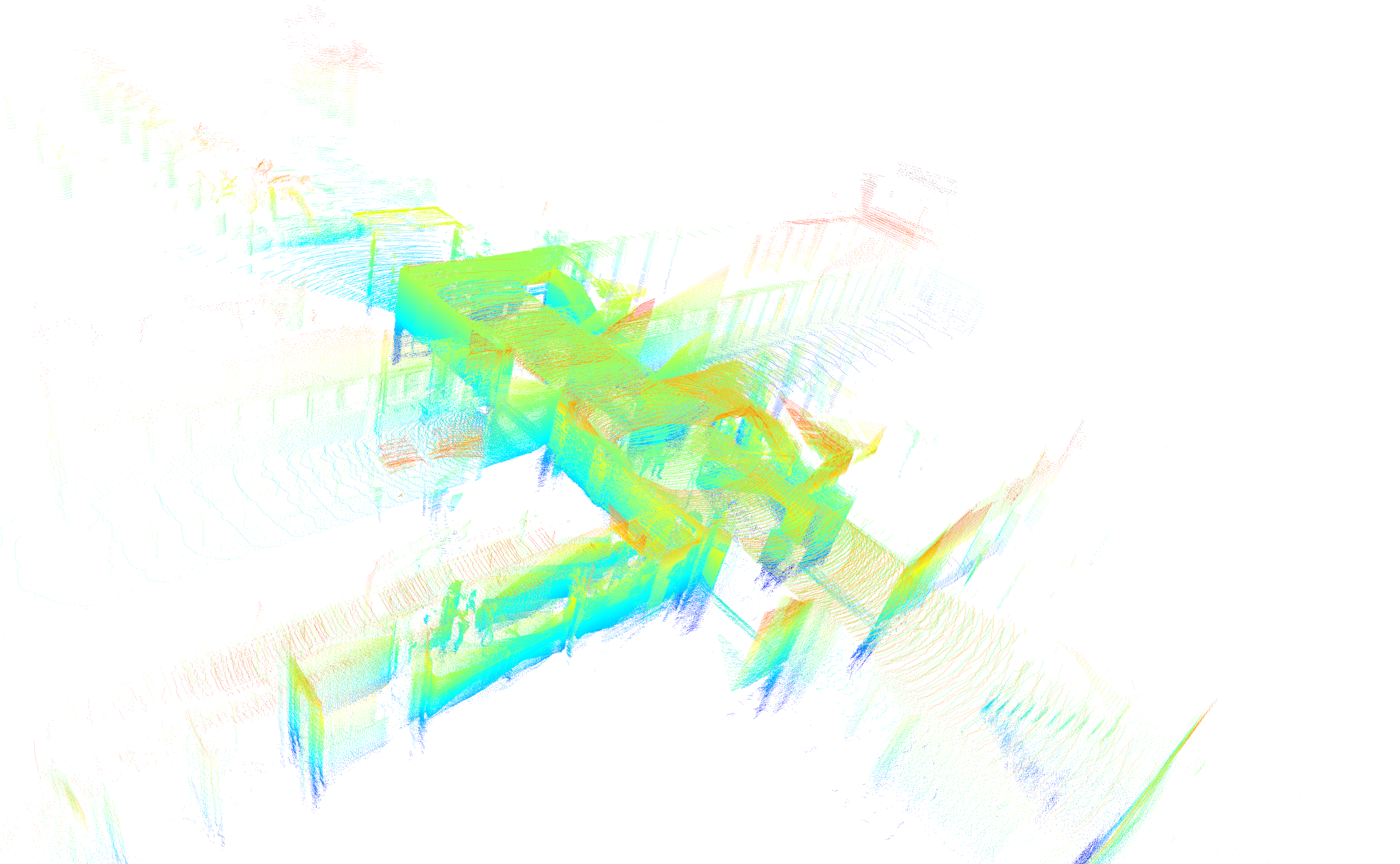
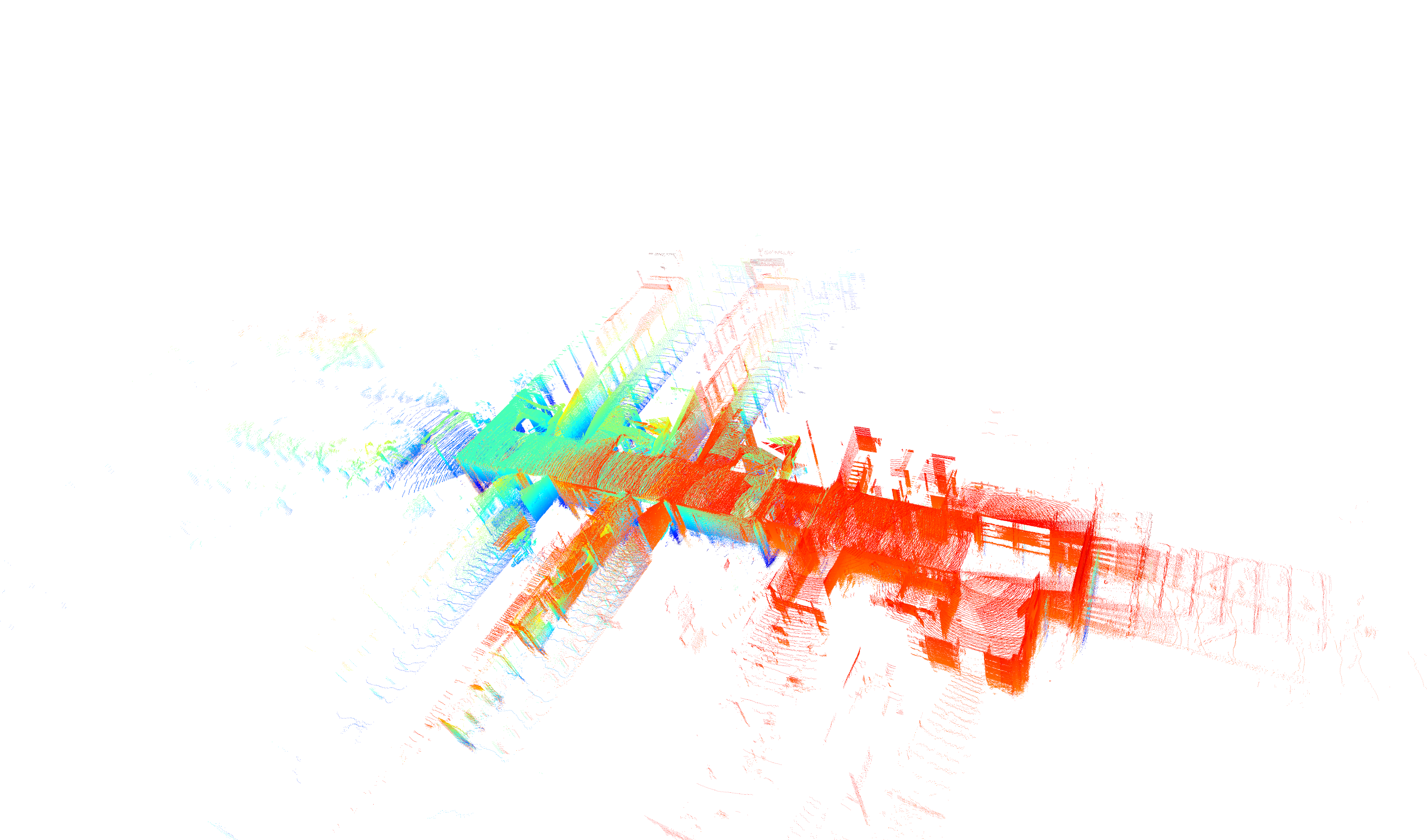
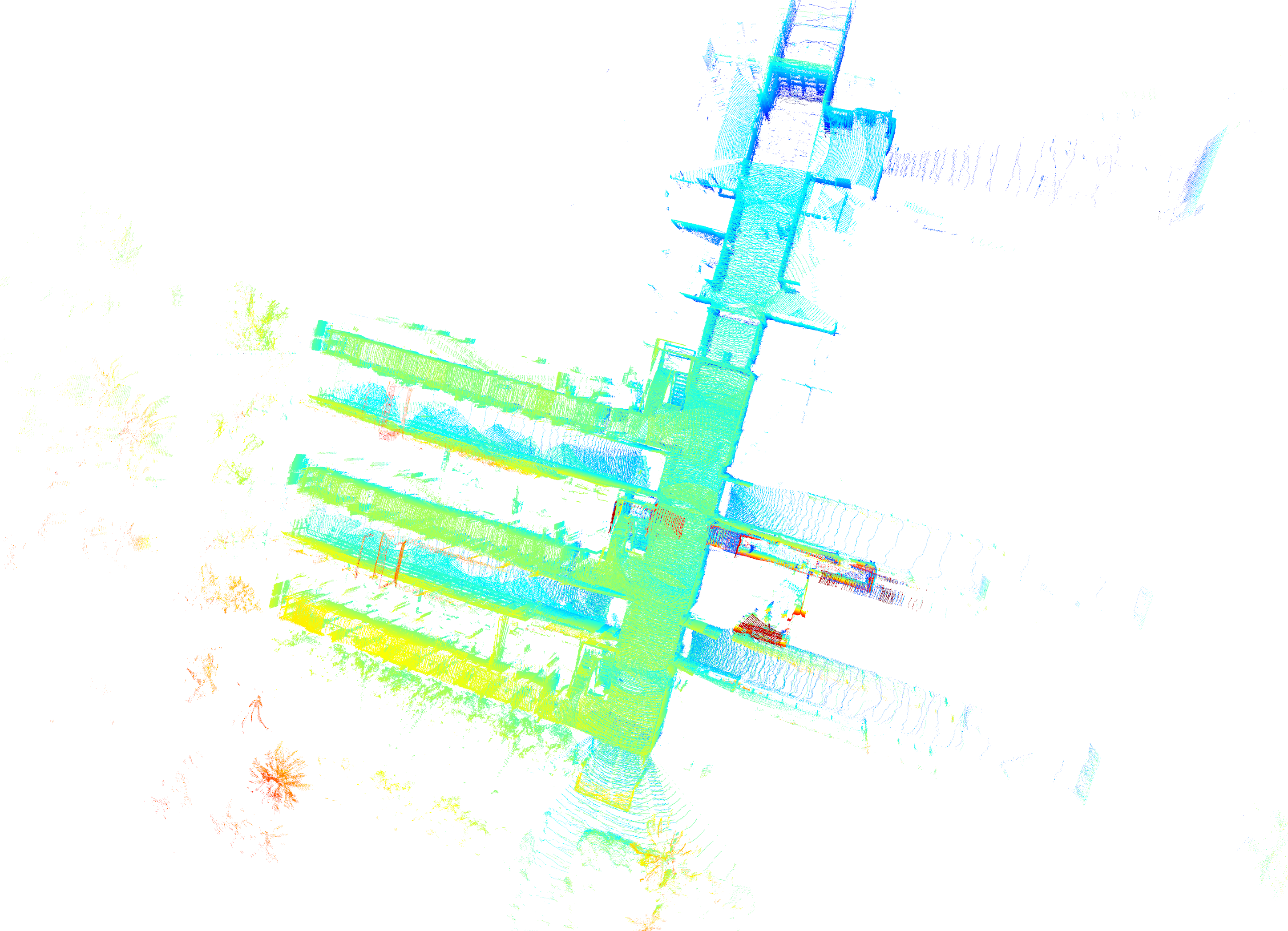
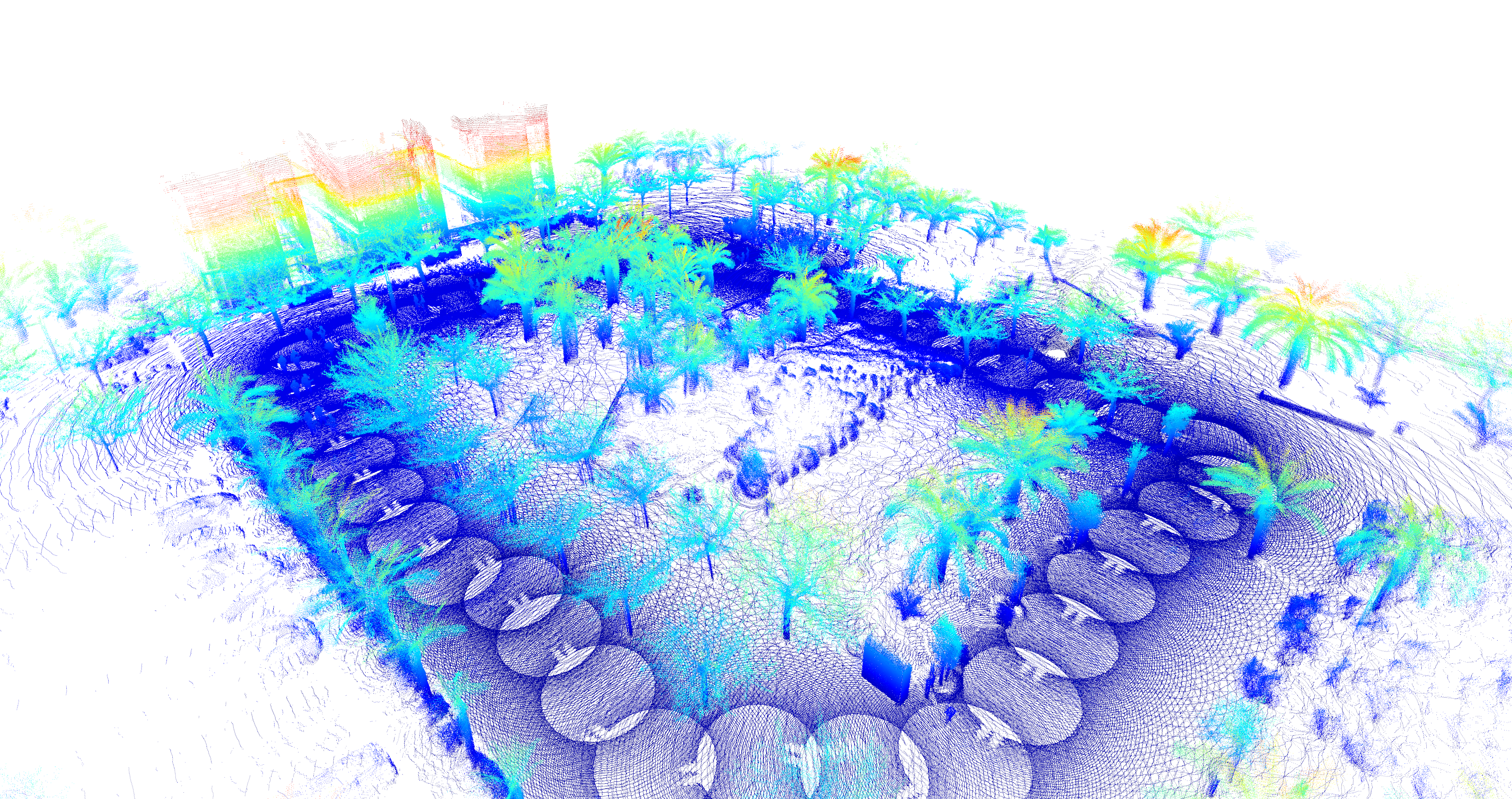
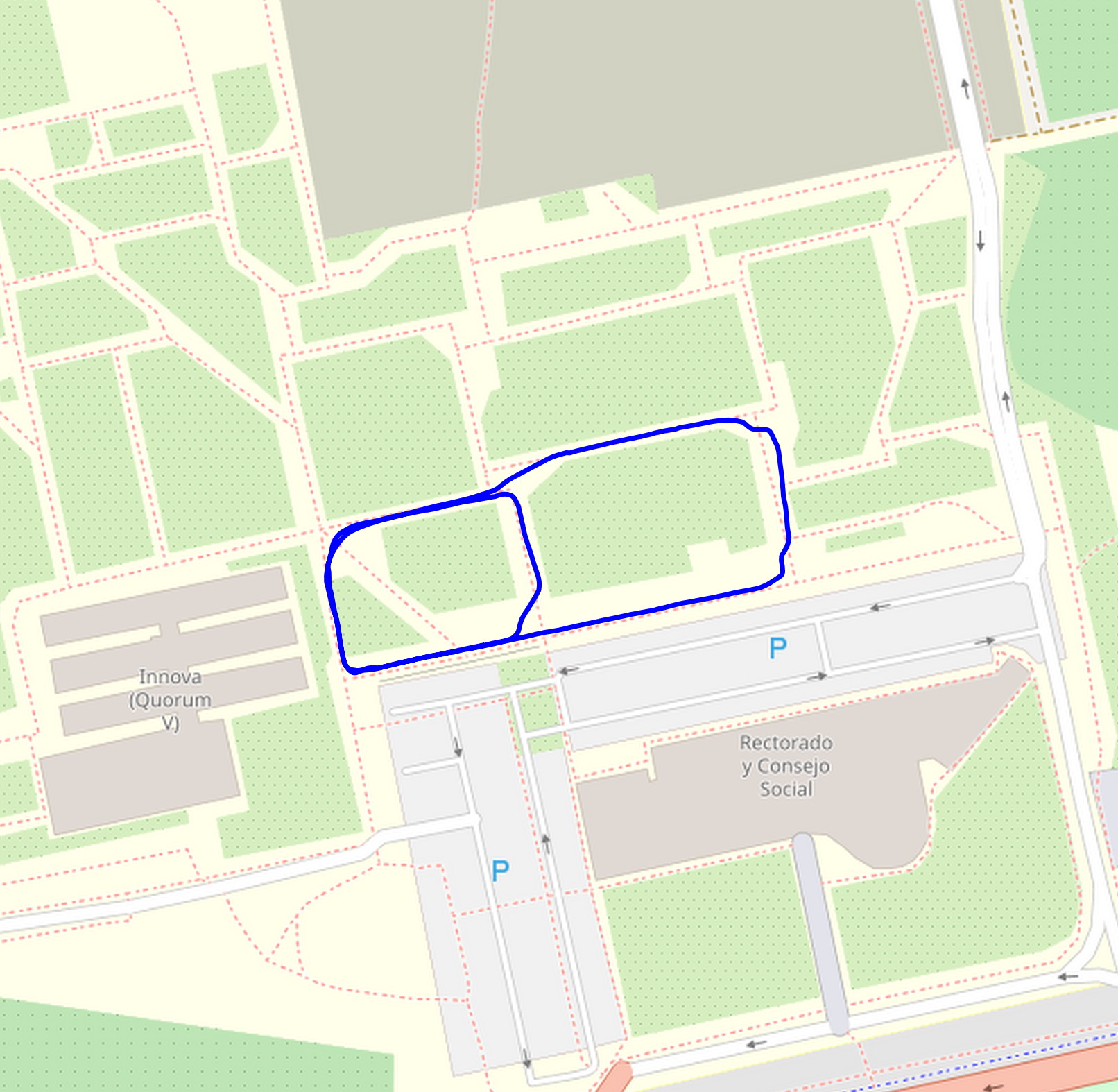
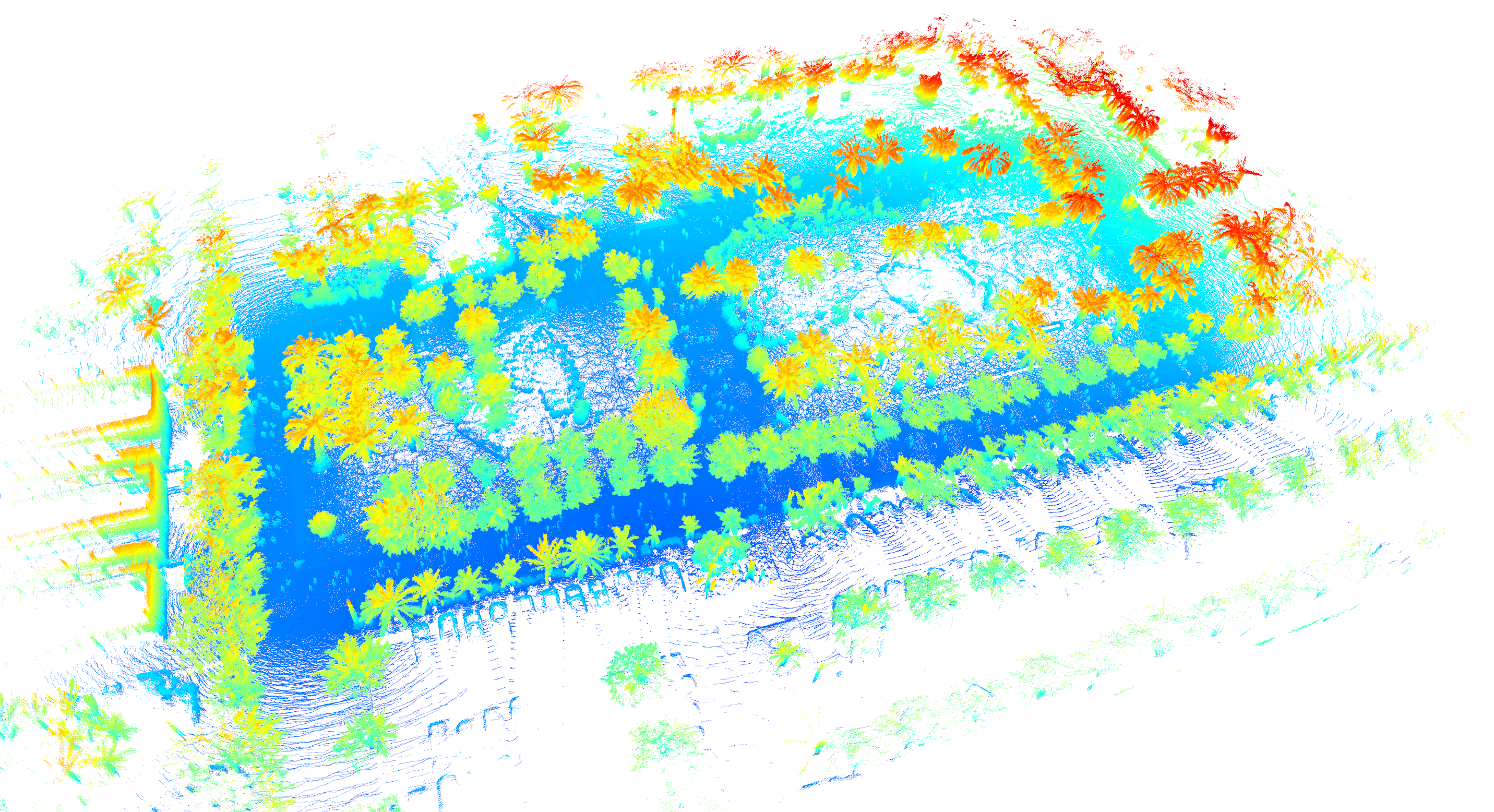
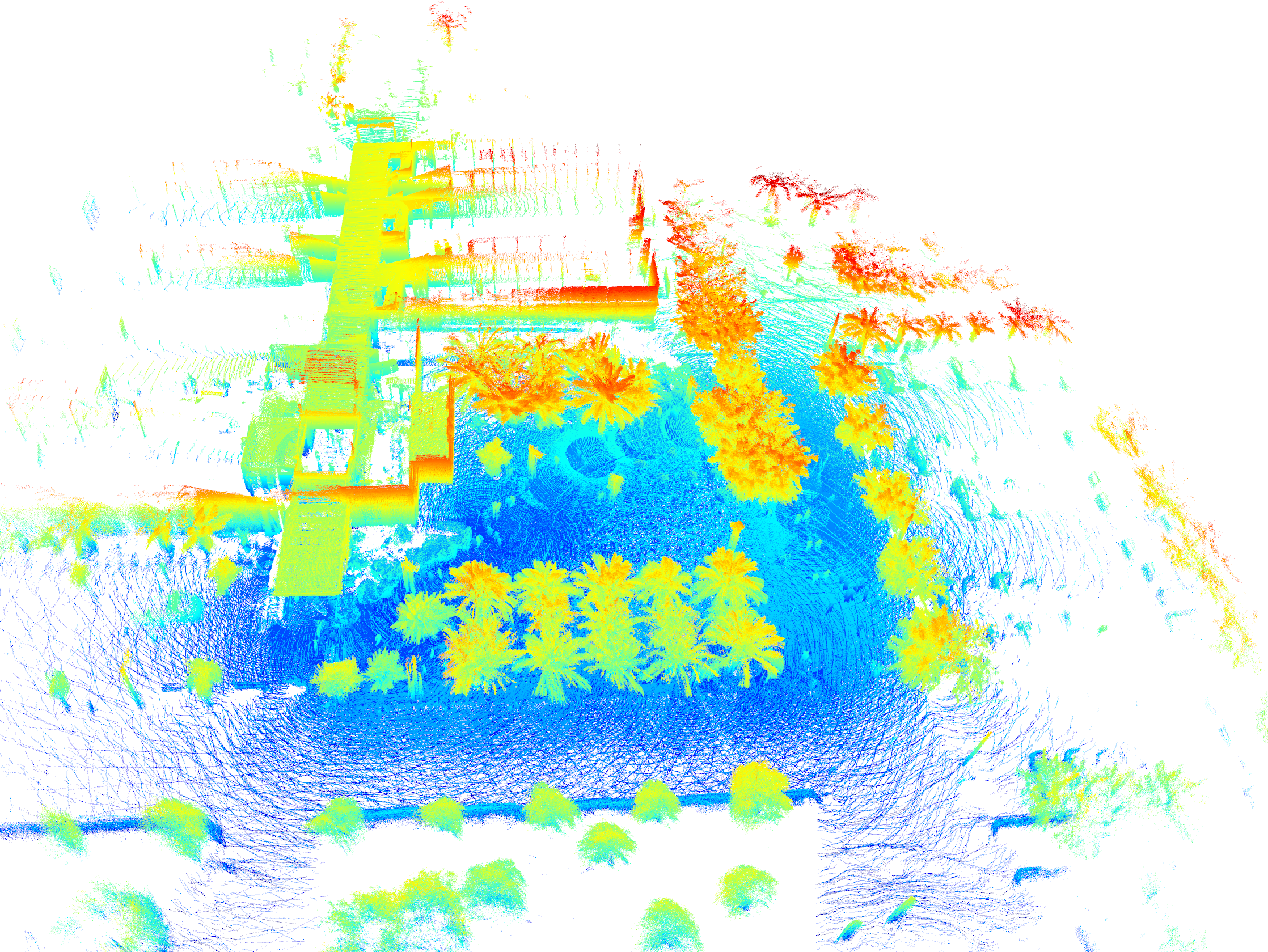
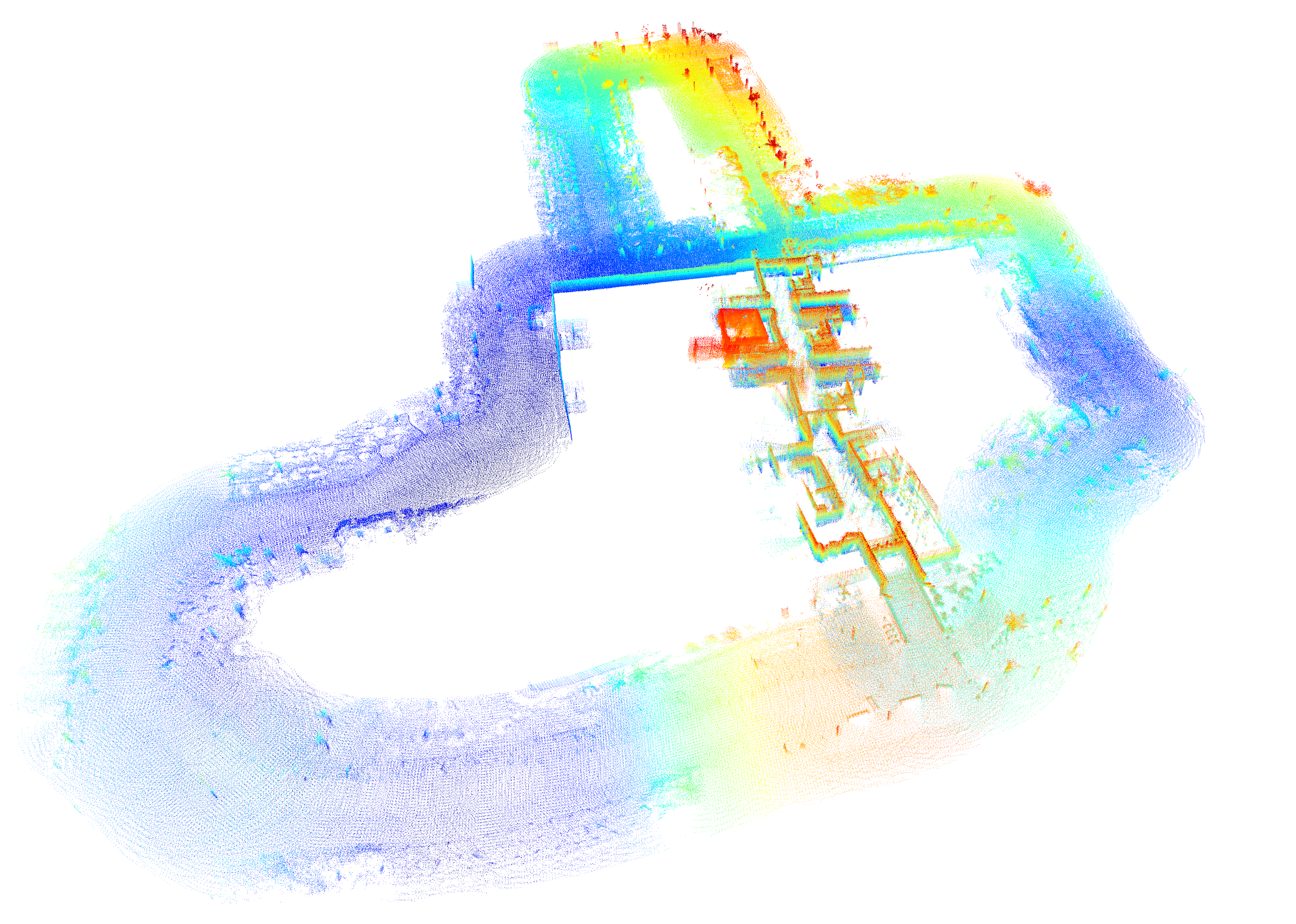
The ARVC Dataset gathers a set of data from trajectories performed with a Husky A200 robot at the Miguel Hernández University of Elche (Alicante, Spain). This database is intended to test navigation, mapping and localization algoritmhs for mobile robots. It contains LiDAR, frontal and posterior fish-eye images, ODOMETRY, GPS/RTK and IMU.
The database includes the following sensorial information: Odometry, GPS, IMU, laser and omnidirectional color images. It has been captured during different times of the day (Morning, Midday, Afternoon and Evening) and also in different days.
DETAILS
Technical data
- Robot platform: Husky A200 @ maximum speed 1 m/s
- Lidar: Ouster OS1-128 @ 10/20 Hz
- IMU:UM7 from redshiftlabs
- Catadioptric camera: Imaging Source DFK 37BUX264 (2448x2048) @ 1 FPS
- Fish-eye lens camera: Garmin VIRB 360, 2 images (2496x2496), FoV: 201.8° @ 30 FPS
- GPS: Harxon Ts100 @1Hz
Format
Two formats are supported:- Standard ROSBAG captured during the experiment.
- EUROC/ASL format with minor variations. In the standard EUROC/ASL rosbags are extracted to a set of directories. Each directory contains information from a singl sensor. Sensors data are stored in a folders with their name (camera, gps, imu, odom, lidar, etc.). In each directory, two files are found:
- A data.csv file : contains the timestamp and, depending on the sensor, the relevant data.
- A /data directory, which stores images and LIDAR pointclouds. Their file names are in the format of {TIMESTAMP}.ext, where .ext is the corresponding extension (.png, .csv, .pcd, etc.) .
For example, 2022-11-28-11-24-49/robot0/camera/data/1669631090139103000.png encodes the following information.
- The place scan was captured on 28/11/2022 and started at 11:24:49 .
- The timestamp in Unix epoch time is 1669631090139103.000.
DOWNLOAD
INDOOR SEQUENCES
| NAME | DATE | ID | INDOOR/OUTDOOR | SENSORS | ILLUMINATION | FILES | MAPS |
|---|---|---|---|---|---|---|---|
| I1 | 2024-03-06 | I1-2024-03-06-13-44-09 | Indoor | ODO, IMU, LIDAR (points=yes, reflectance=yes) | (irrelevant) | .bag .euroc Map LiDAR details |
|
| I2 | 2024-03-06 | I2-2024-03-06-13-50-58 | Indoor | ODO, IMU, LIDAR (points=yes, reflectance=yes) | (irrelevant) | .bag .euroc Map LiDAR details |
|
| I3 | 2024-04-22 | I3-2024-04-22-15-21-28 | Indoor | ODO, IMU, LIDAR (points=yes, reflectance=no) | (irrelevant) | .bag .euroc Map LiDAR details |
|
OUTDOOR SEQUENCES
| NAME | DATE | ID | INDOOR/OUTDOOR | SENSORS | ILLUMINATION | FILES | MAPS |
|---|---|---|---|---|---|---|---|
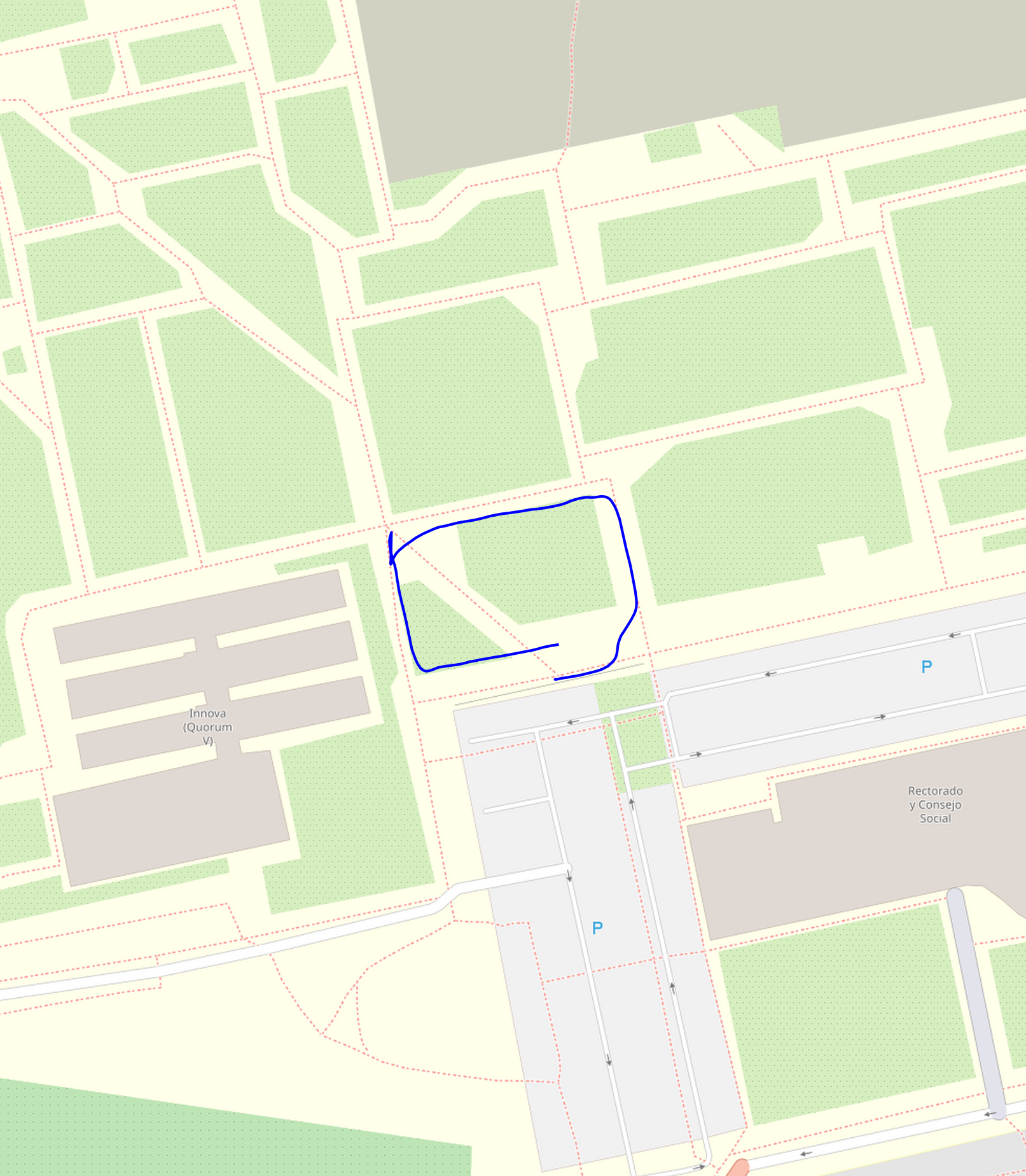
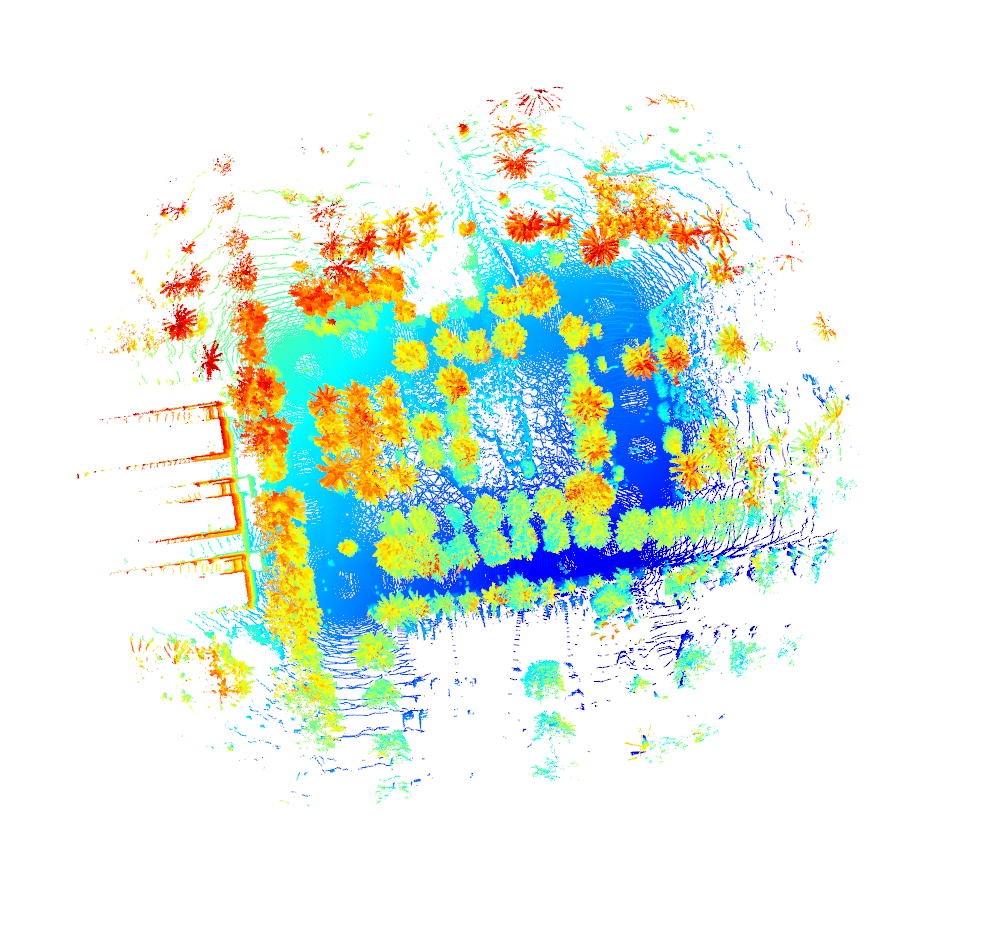
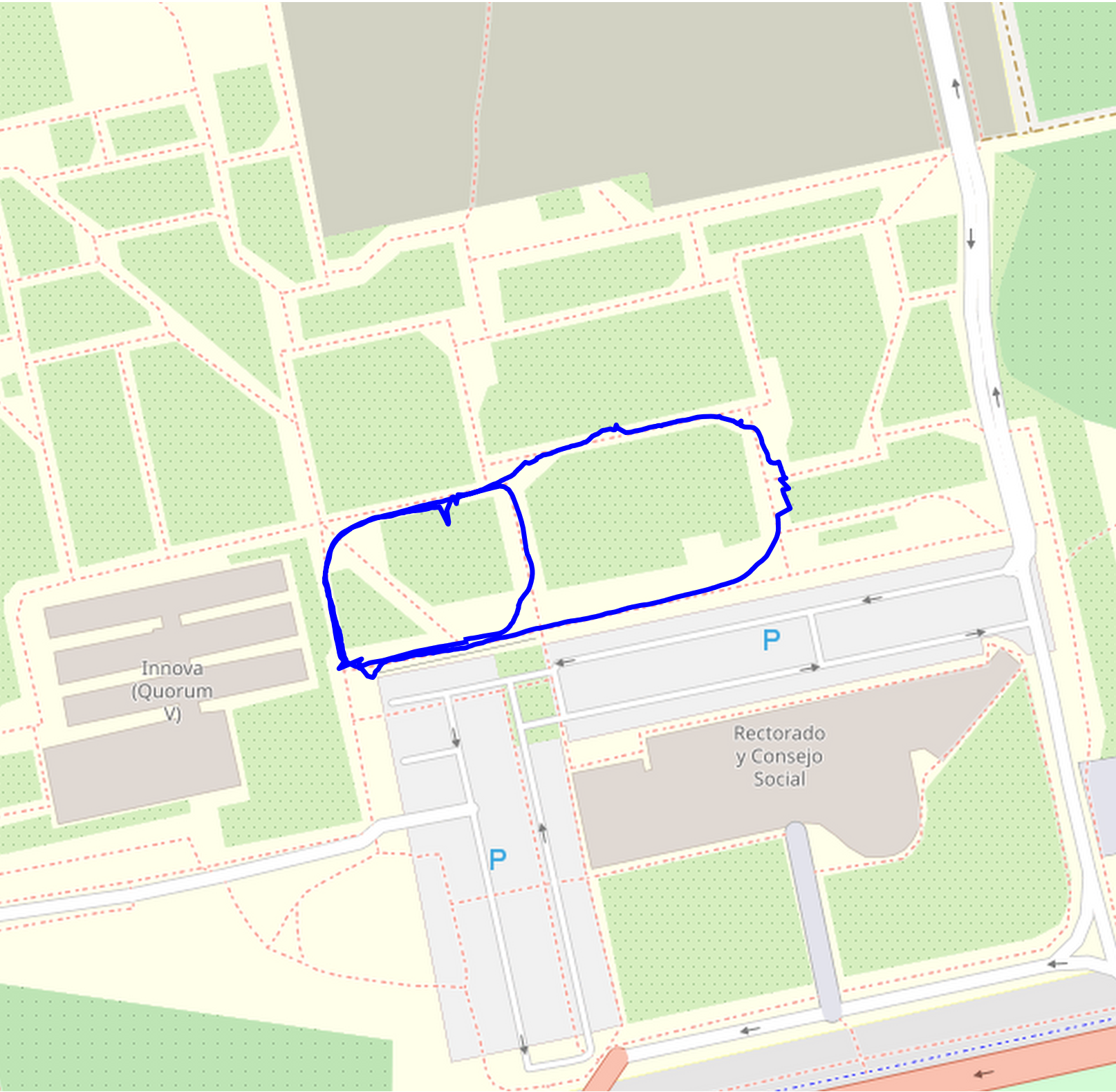
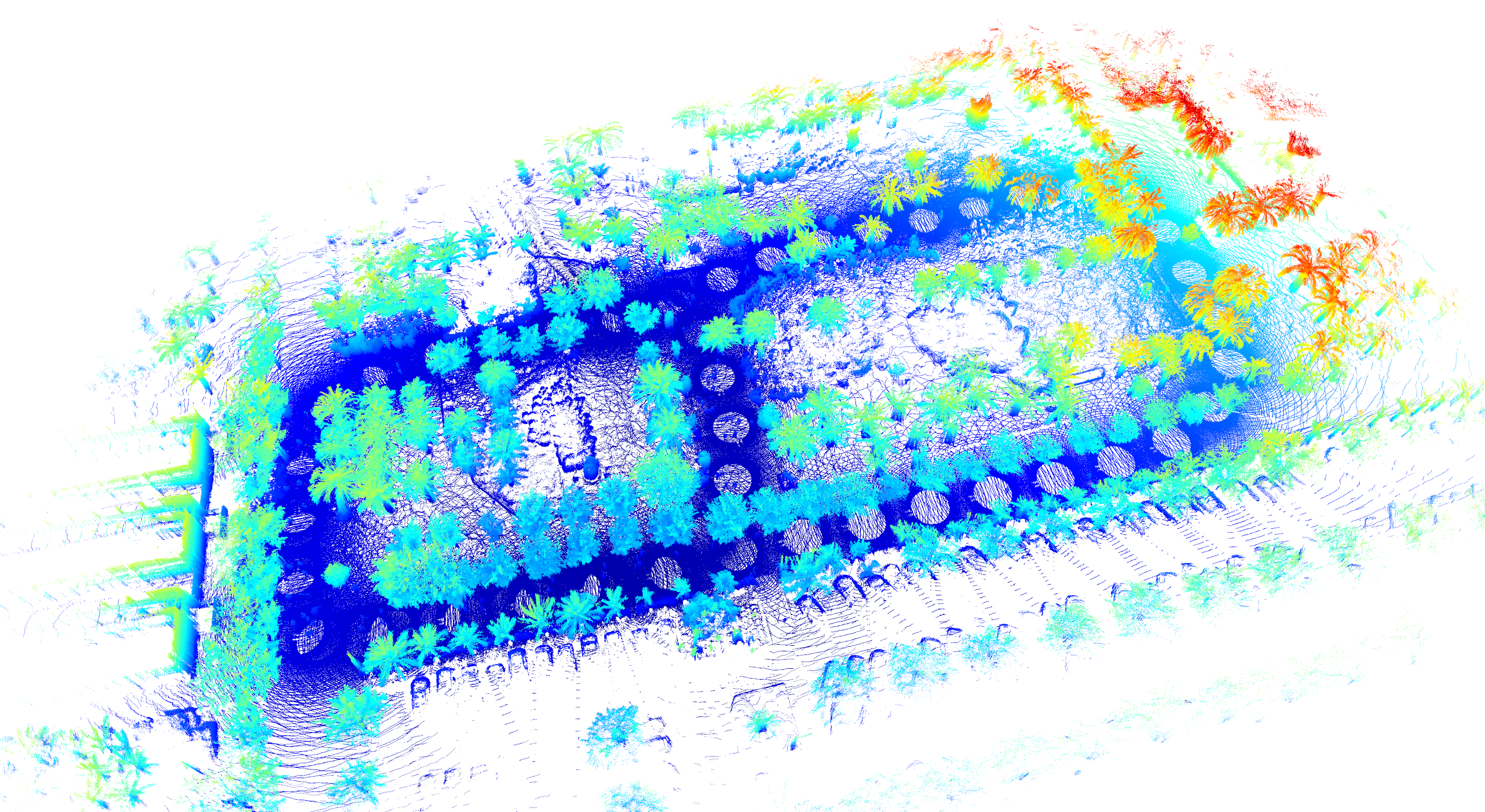
| O1 | 2024-03-06 | O1-2024-03-06-17-30-39 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
| O2 | 2024-03-07 | O2-2024-03-07-13-33-34 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
| O3 | 2024-03-18 | O3-2024-03-18-17-11-17 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
| O4 | 2024-04-22 | O4-2024-04-22-13-27-47 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
| O5 | 2024-04-24 | O5-2024-04-24-12-47-35 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
| O6 | 2024-04-10 | O6-2024-04-10-11-09-24 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |
|
| O7 | 2024-04-22 | O7-2024-04-22-13-45-50 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |
|
| O8 | 2024-04-24 | O8-2024-04-24-13-05-16 | Outdoor | ODO, IMU, LIDAR (points=yes, reflectance=no), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |
|
INDOOR/OUTDOOR SEQUENCES
| NAME | DATE | ID | INDOOR/OUTDOOR | SENSORS | ILLUMINATION | FILES | |
|---|---|---|---|---|---|---|---|
| IO1 | 2024-05-03 | IO1-2024-05-03-09-51-52 | Outdoor and Indoor | ODO, IMU, LIDAR (points=yes, reflectance=yes), GPS/RTK | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
| IO2 | 2025-03-25 | IO2-2025-03-25-16-54-17 | Outdoor and Indoor | ODO, IMU, LIDAR, ARUCO (points=yes, reflectance=yes), GPS | Sunny. No clouds. | .bag .euroc Map OSM Map LiDAR details |

|
Publications
Pending Publication...
Visit also
- ARVC (Automation, Robotics and Computer Vision group): Visit our research group.