
|


|

|
  |
| Inicio | |
| Personas | |
| Investigación | |
| Proyectos | |
| Publicaciones | |
| Tesis | |
| Patentes | |
| Premios | |
| Estancias | |
| Docencia | |
| Actividades | |
| Datasets | |
| Enlaces | |
| Gestión | |
")     |
|
PROMETEO2021
Hacia una Mayor Integración de Robots Inteligentes en la Sociedad: Navegar, Reconocer y Manipular
|
Durante los últimos años el número de robots que se utilizan para la realización de tareas de forma autónoma en múltiples ámbitos y sectores se ha venido incrementando paulatinamente. Hoy en día es posible encontrarnos la presencia de robots realizando tareas repetitivas y en entornos controlados abordando tareas complejas y en ocasiones peligrosas. Sin embargo, la realización de tareas por parte de robots en entornos no controlados con presencia de objetos y elementos móviles (como puede ser la presencia de personas y otros robots) y que requieren la necesidad de realizar desplazamientos entre diferentes puntos de la escena presenta notables inconvenientes que es preciso abordar con objeto de posibilitar una mayor integración de los robots en este tipo de escenarios.
EQUIPO DE INVESTIGACIÓN
Tabla 1: Composición del grupo de investigación:
CRONOGRAMA DE ACTIVIDADES 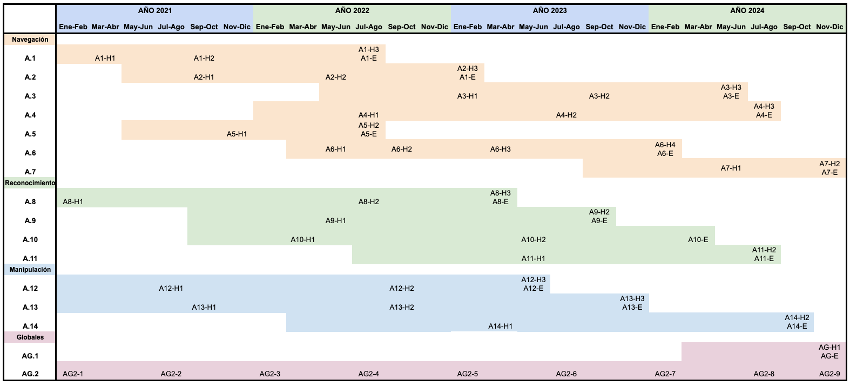 Línea de Navegación A.1 Creación de modelos topológicos visuales, de manera incremental. A.2 Creación de modelos híbridos jerárquicos, a partir de la información capturada por un sistema de visión omnidireccional y un LiDAR 3D. A3. Resolver el problema de localización a partir de los modelos creados, con una incertidumbre asociada, en función de las estimaciones previas y la fiabilidad de la información capturada por los sensores. A4. Localización de robots en entornos exteriores mediante imágenes georreferenciadas, sin exploración previa y haciendo uso de LiDAR y cámaras. A5. Calibración automática de sensores Cámara-LiDAR en exteriores y situaciones adversas. A6. Planificador de misiones para determinar las trayectorias y acciones de que la plataforma robótica móvil con manipulador debe llevar a cabo. A7. Extensión del planificador de misiones. Línea de reconocimiento A.8 Segmentación de imágenes en regiones con significado en escenas de interior y exterior. A.9 Interpretación de la escena a partir de la fusión de las imágenes y los datos de láser. A.10 Detección y aprendizaje profundo de las zonas estables en las imágenes ante diferentes condiciones de iluminación. A.11 Estimación y modelado de las trayectorias de los objetos usando información visual y tridimensional. Línea de Manipulación A.12 Calcular puntos de contacto desde múltiples vistas. A.13 Detectar deslizamiento/movimiento en objetos en mano. A.14 Control táctil en tareas de manipulación. Actividades Globales AG.1 Experimentación y pruebas de validación. AG.2: Coordinación, gestión y difusión de resultados. |
Noticias



| © Laboratorio de Automatización Robótica y Visión por Computador (ARVC) - UMH |