|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
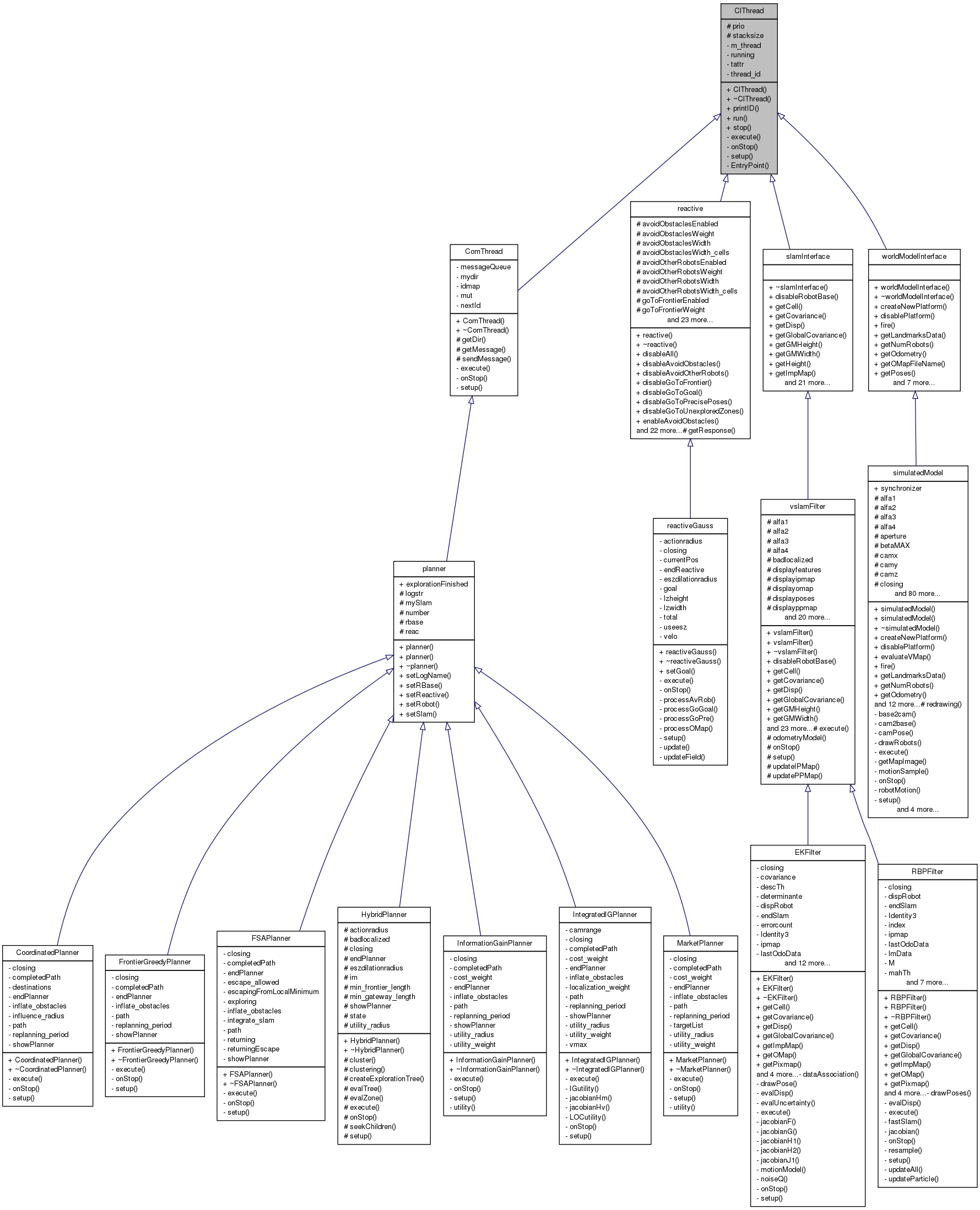
Implements a platform-independent threaded superclass. More...
#include <ClThread.h>
Public Member Functions | |
| ClThread () | |
| Constructor. | |
| virtual | ~ClThread () |
| Destructor. | |
| void | printID (char *str) |
| Prints the Thread ID. | |
| int | run () |
| runs the setup method and starts the thread | |
| void | stop () |
| calls the onStop method and stops the thread | |
Protected Attributes | |
| int | prio |
| size_t | stacksize |
Private Member Functions | |
| virtual void | execute () |
| virtual method for the thread main process. | |
| virtual void | onStop () |
| this virtual method will be executed when the stop method is called | |
| virtual int | setup () |
| this virtual method will be executed when trying to start the thead, must return 0 if ok | |
Static Private Member Functions | |
| static void * | EntryPoint (void *pthis) |
| Thread entry point function. | |
Private Attributes | |
| pthread_t | m_thread |
| bool | running |
| pthread_attr_t | tattr |
| pthread_t | thread_id |
Implements a platform-independent threaded superclass.
Derive a class from this one and implement the vitual methods:
Definition at line 31 of file ClThread.h.
 1.7.6.1
1.7.6.1

