|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
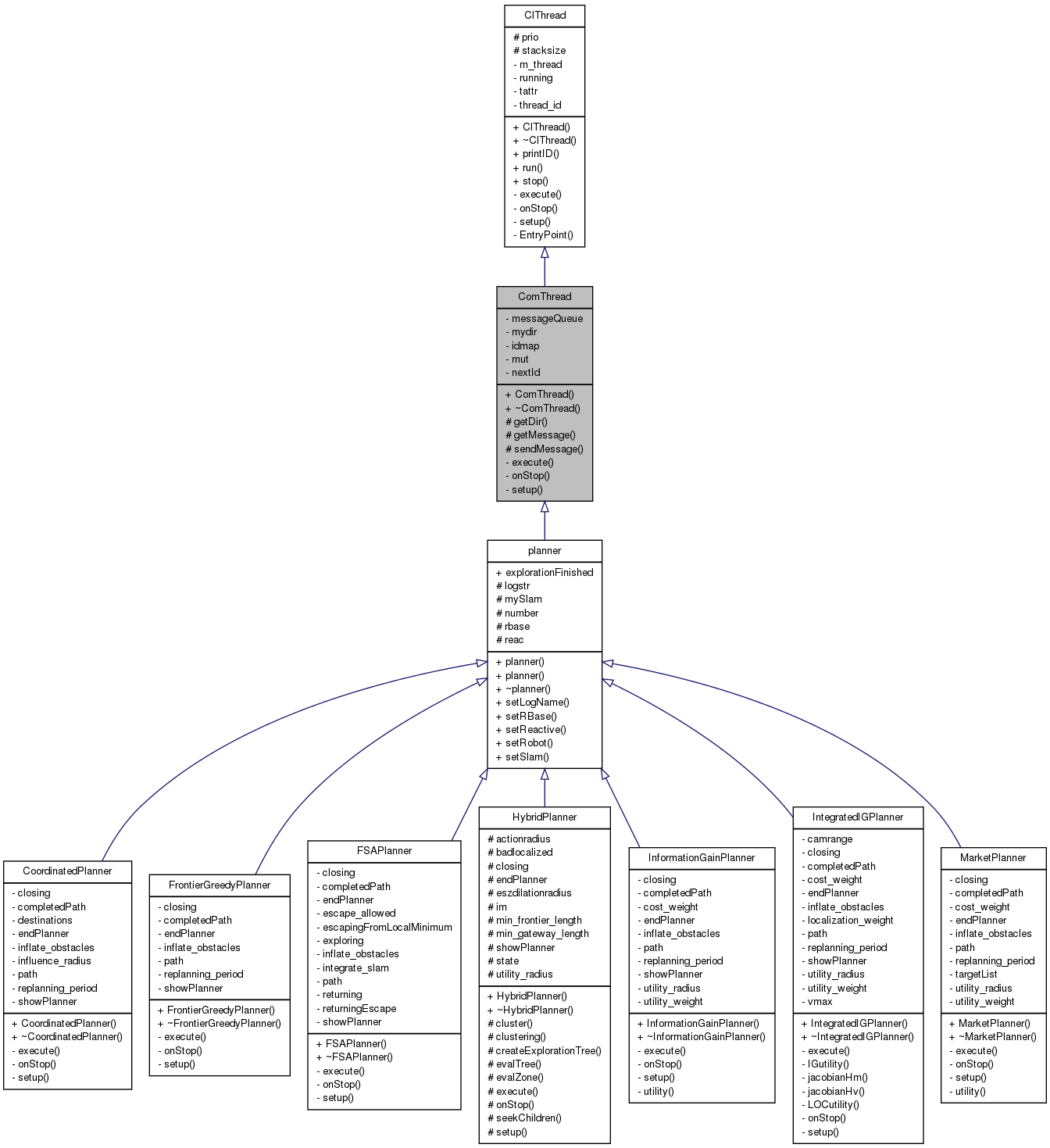
Implements communication between threads. More...
#include <ComThread.h>
Public Member Functions | |
| ComThread () | |
| constructor | |
| virtual | ~ComThread () |
| destroyer | |
Protected Member Functions | |
| int | getDir () |
| Returns the communication address of the object. | |
| int | getMessage (std::string &msg) |
| Reads the oldest message in the queue. | |
| void | sendMessage (const std::string &msg, int dir) |
| Sends a message to a specific address (dir < 0 to broadcast) | |
Private Member Functions | |
| virtual void | execute () |
| virtual method for the thread main process. | |
| virtual void | onStop () |
| this virtual method will be executed when the stop method is called | |
| virtual int | setup () |
| this virtual method will be executed when trying to start the thead, must return 0 if ok | |
Private Attributes | |
| std::list< std::string > | messageQueue |
| int | mydir |
Static Private Attributes | |
|
static std::map< int, std::list< std::string > * > | idmap |
| static ClMutex | mut |
| static int | nextId = 0 |
Implements communication between threads.
Objects of classes derived from ComThread can send (to a specific address) or broadcast (to everybody) messages to other ComThread derived objects
The messages received are cummulated in a FIFO queue that can be read at any moment
Definition at line 30 of file ComThread.h.
 1.7.6.1
1.7.6.1

