|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
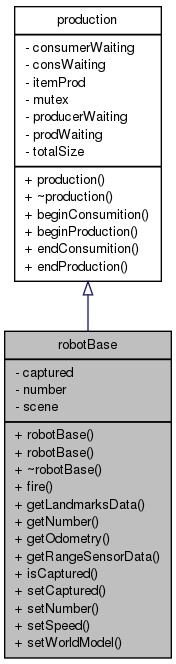
This class reference a robotic plattform in the simulator. More...
#include <robotBase.h>
Public Member Functions | |
| robotBase () | |
| Default constructor. | |
| robotBase (int number) | |
| Builds a robotBase with ID number and a vitualWorld associated. | |
| virtual | ~robotBase () |
| Default destructor. | |
| int | fire () |
| landmarksData * | getLandmarksData () |
| returns the landmarks data | |
| int | getNumber () const |
| sets the robot ID number | |
| pose * | getOdometry () |
| returns the robot odometry | |
| rangeSensorData * | getRangeSensorData () |
| returns the range sensor current data | |
| bool | isCaptured () |
| void | setCaptured () |
| void | setNumber (int number) |
| sets the robot ID number | |
| void | setSpeed (float v, float w) |
| sets the linear and angular speed | |
| void | setWorldModel (void *scence) |
| sets the reference to the virtual world object | |
Private Attributes | |
| bool | captured |
| int | number |
| void * | scene |
This class reference a robotic plattform in the simulator.
Definition at line 26 of file robotBase.h.
 1.7.6.1
1.7.6.1

