|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
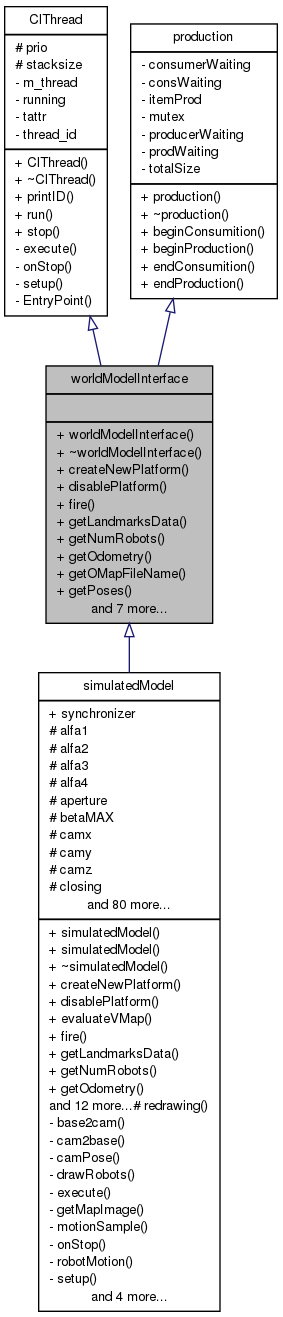
Defines the world model interface. More...
#include <worldModelInterface.h>
Public Member Functions | |
| virtual robotBase * | createNewPlatform ()=0 |
| virtual void | disablePlatform (const robotBase &r)=0 |
| virtual int | fire (int robot)=0 |
| virtual landmarksData * | getLandmarksData (int robot)=0 |
| returns the landmarks data | |
| virtual int | getNumRobots ()=0 |
| virtual pose * | getOdometry (int robot)=0 |
| returns the robot odometry | |
| virtual const char * | getOMapFileName () const =0 |
| virtual rposes | getPoses () const =0 |
| virtual rangeSensorData * | getRangeSensorData (int robot)=0 |
| returns the range sensor current data | |
| virtual float | getSampleTime () const =0 |
| virtual float | getTime () const =0 |
| virtual void | initialize (int nBots, ConfigFile &configfile, float sampletime)=0 |
| initializer | |
| virtual void | randomPoses (bool group, double maxInitialPoseDist, double minInitialPoseDist)=0 |
| virtual void | setLogName (const char *)=0 |
| sets the name of the log file | |
| virtual void | setNumRobots (int num)=0 |
| virtual void | setSpeed (int r, float v, float w)=0 |
| sets the linear and angular speed for a robot | |
Defines the world model interface.
Definition at line 34 of file worldModelInterface.h.
 1.7.6.1
1.7.6.1

