|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
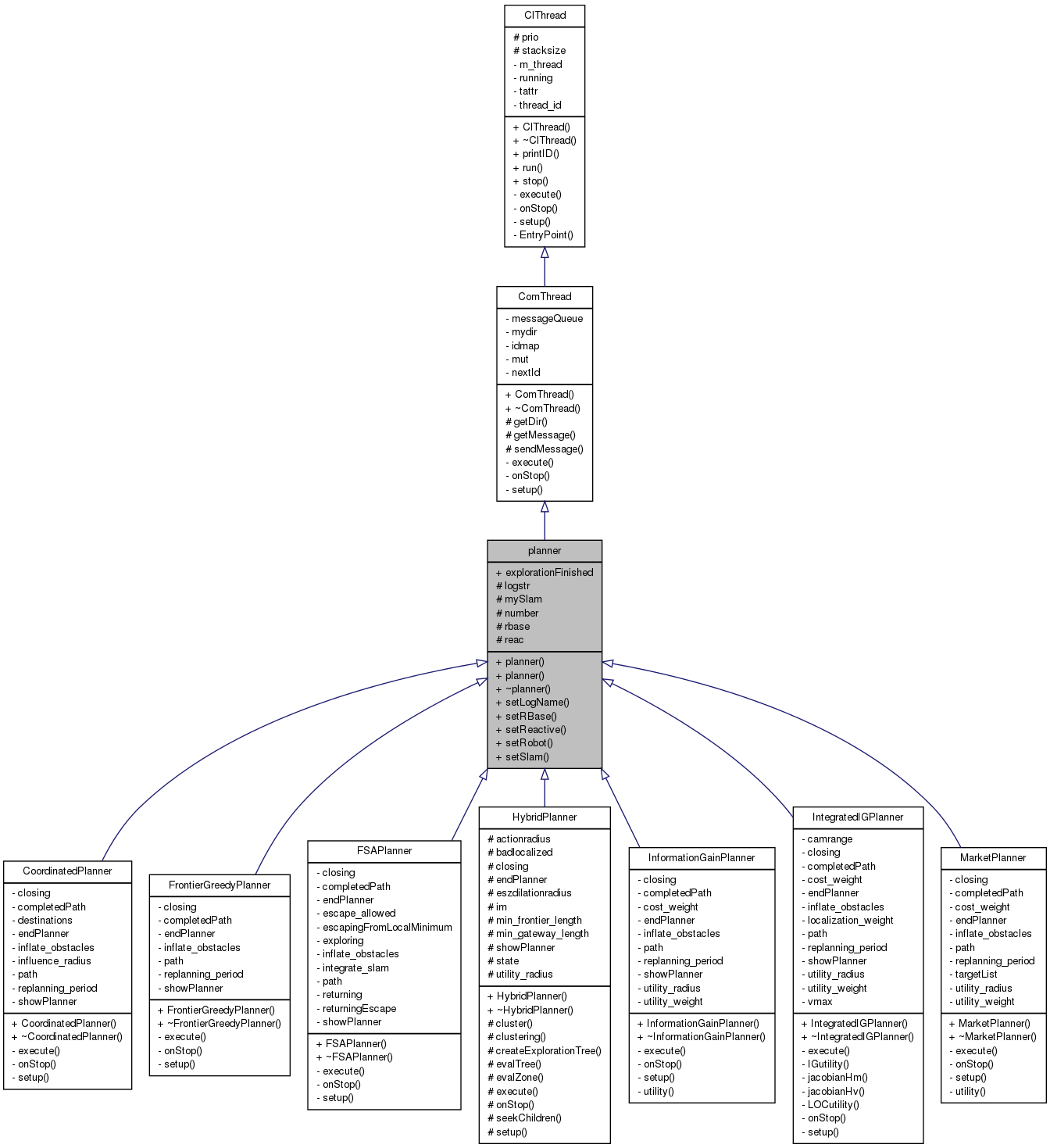
Implements common methods for planning algorithms. More...
#include <planner.h>
Public Member Functions | |
| planner (const ConfigFile &config) | |
| void | setLogName (const char *) |
| void | setRBase (robotBase &rb) |
| void | setReactive (reactive &reac) |
| void | setRobot (int number) |
| void | setSlam (slamInterface &slamProc) |
Public Attributes | |
| stepEventManager | explorationFinished |
Protected Attributes | |
| char * | logstr |
| slamInterface * | mySlam |
| int | number |
| robotBase * | rbase |
| reactive * | reac |
 1.7.6.1
1.7.6.1

