|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
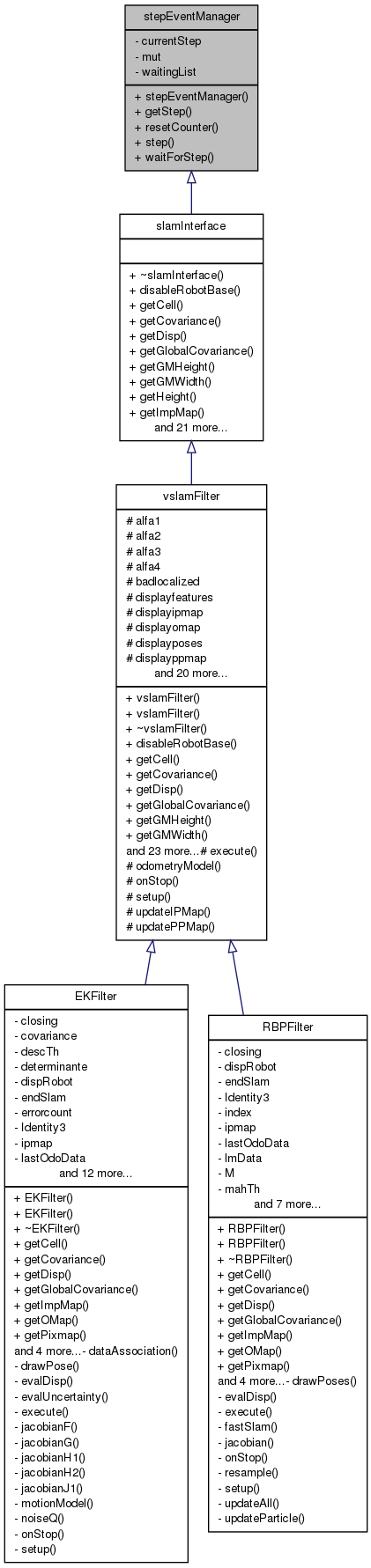
Thread synchronization using a waif for step model. More...
#include <stepEvent.h>
Public Member Functions | |
| int | getStep () |
| void | resetCounter () |
| void | step () |
| void | waitForStep (int step) |
Private Attributes | |
| int | currentStep |
| ClMutex | mut |
| std::vector< waitingThread * > | waitingList |
Thread synchronization using a waif for step model.
Definition at line 38 of file stepEvent.h.
 1.7.6.1
1.7.6.1

