Logo created by Panetone
DOWNLOAD
VIDEOS
PRACTICAL SESSIONS
THEORY LESSONS
INSTALL
ONLINE HELP
LIST OF SUPPORTED ROBOTS
PEOPLE USING THE LIBRARY
VISIT ALSO
SOME SNAPSHOTS
INTRODUCTION
ARTE is a Matlab toolbox focussed on robotic manipulators, both serial and parallel mechanisms are included.
The main features of ARTE are:
- You can simulate any industrial robot within a Matlab environment.
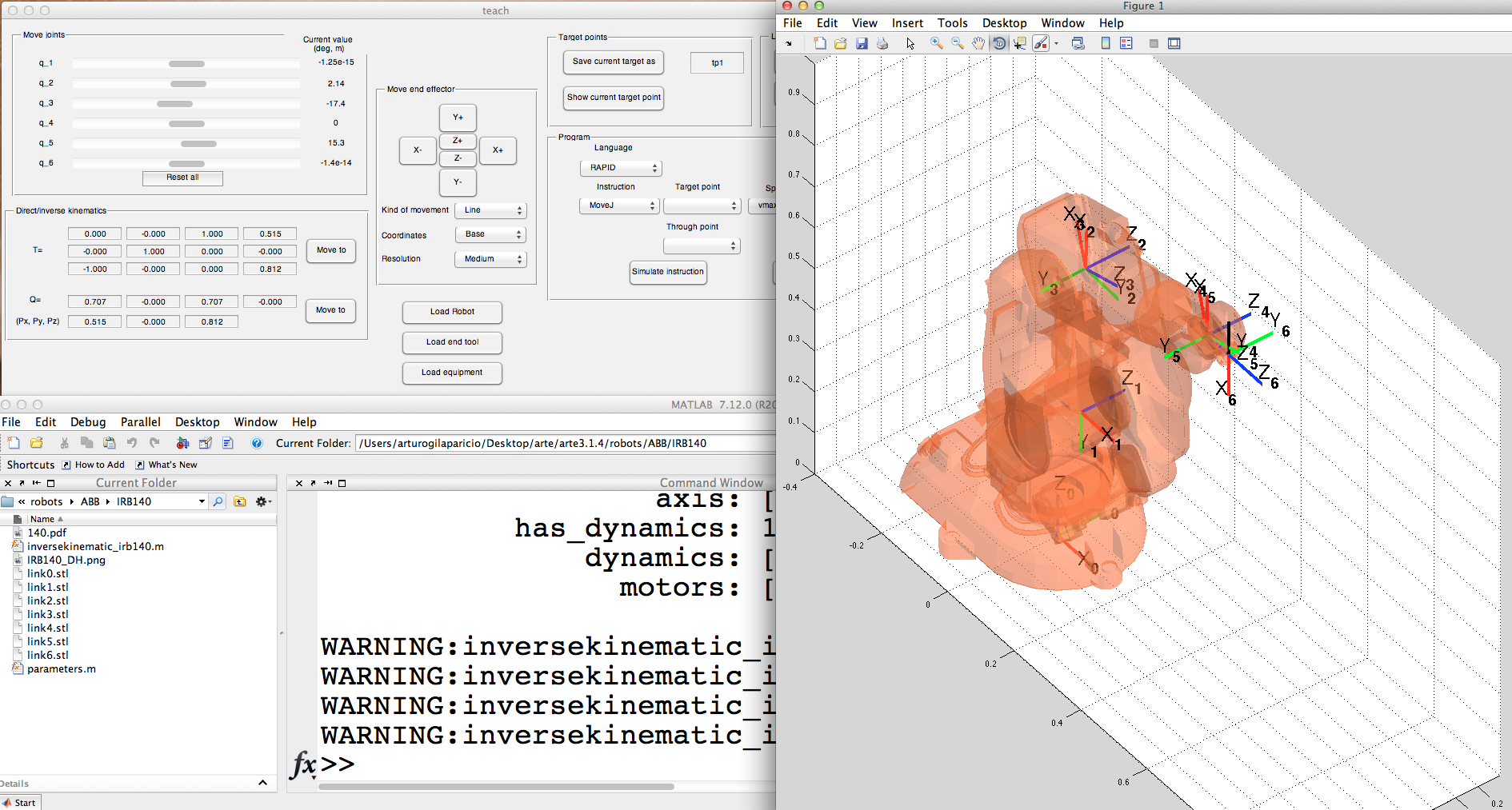
- Represent a visualize the Denavit-Hartenberg's system on the robot.
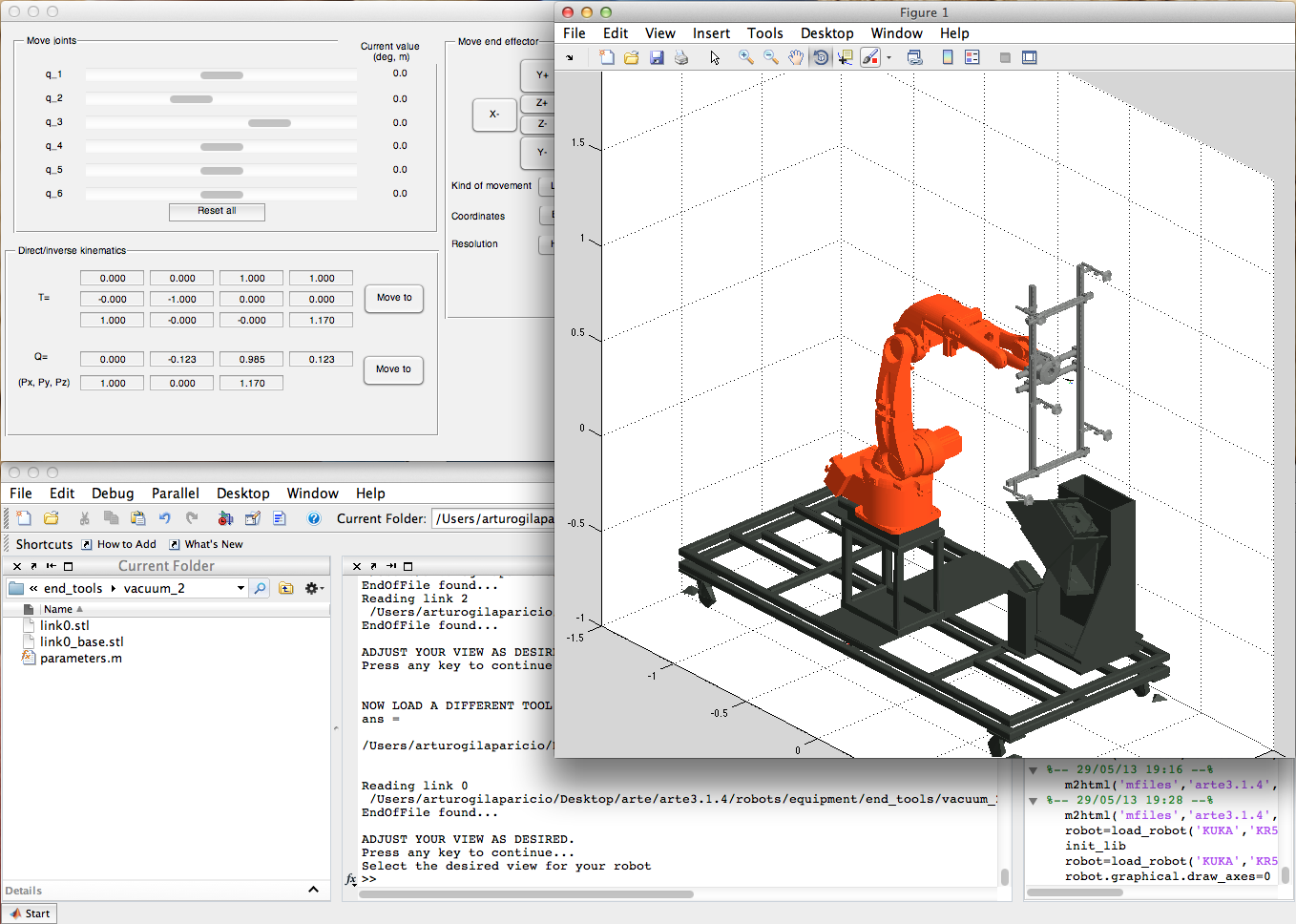
- 3D graphics of a great number of industrial robots are available.
- You can plot and observe the position, velocity and acceleration of the joint coordinates of the robot when a movement is performed.
- Also, the torques and forces at each joint can be plotted.
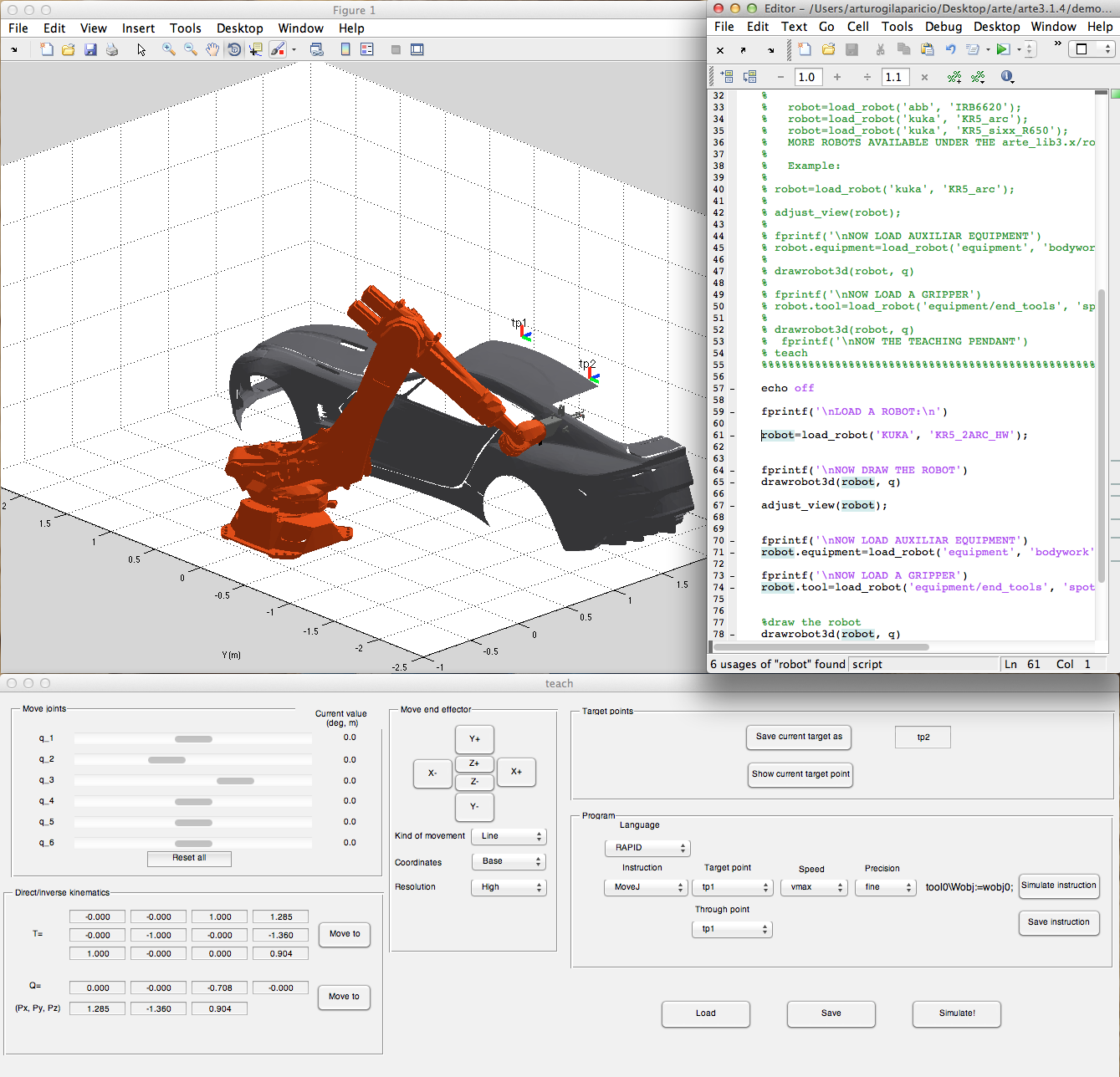
- A GUI teaching pendant is available to move and program the robots.
- The robots can be programmed and simulated ABB RAPID language. A step by step simulation of the programs can be carried out within the Matlab's editor and debugger.
- A Matlab to RAPID interpreter is included that allows to program the real robot using your Matlab code.
- New robot models can be easily included.
- Practical sessions are provided.
Created by Arturo Gil and the robotics students from 2012 in Miguel Hernández University (UMH), Spain.
Please, send any suggestions to arturo.gil![]() umh.es.
umh.es.


DOWNLOAD
ARTE is distributed under LGPL license, feel free to download it:- Download the ARTE LIBRARY as a ZIP file
- Or clone the latest version with git: git clone https://github.com/4rtur1t0/ARTE
SOME VIDEOS
- Video (english): With ARTE you can simulate your robot in Matlab and then translate the code to program a real robot.
- Video (english): Basic steps to develop a robotic application in ARTE.
- Video (english): Watch the 5R, 3RRR and Delta robots included in the library.
PRACTICALS
ARTE is distributed along with some practical sessions that can be carried out with the library:- Practical session 0: Introduction to ARTE.
- Video 0 (english): Download and install the library. Watch the main features of ARTE.
- Practical session 1: Direct kinematics.
- Video 1 (spanish): Compute T from the joints q using directkinematic(). Draw a robot in 3D.
- Practical session 2: Inverse kinematics.
- Video 2 (sorry, in spanish): Compute q from T using inversekinematic.
- Practical session 3: Inverse dynamics.
- Practical session 4: Forward dynamics.
- Practical session 5: RAPID programming. (RAPID reference, the ABB IRB 140 in action)
- Video 5.1 (english): Develop a RAPID application in ARTE.
- Video 5.2 (english): Basic STEPS to develop a packaging application in ARTE.
- Practical session 6: PID independent control.
- Practical session 7: Add your robot to the library.
- Practical session 8: Parallel robots.
![]()
![]()
The whole list of youtube videos describing ARTE can be found here. Or check out the list in iTunes.
THEORY LESSONS
Watch some explanations of the concepts involved in the library.Lectures and more material can be found here (in spanish, sorry).
INSTALL
copy the directory containing all the .m files in a directory named arte3.2.0
add the whole directory and sub-directories to the Matlab PATH
To initialize the library, inside Matlab you should be placed in the directory where the library is installed:
>> pwd
ans =
/Users/arturo/Desktop/arte3.2.0
Next, in the Matlab command prompt type:
>> init_lib
To view all functions and demos type:
>>help Contents
If you want to have a fast view of the main capabilities of the library, type:
>> demos
**********************************
HOME PAGE
**********************************
http://arvc.umh.es/arte
ONLINE HELP
LIST OF SUPPORTED ROBOTS
- Here you can find the a list with all the robots supported by the library.
- Have a look at this video if you want to add a robot to the library.
VISIT ALSO
PEOPLE USING THE LIBRARY
OTHER INTERESTING SITES
SOME SNAPSHOTS
- Inverse and direct kinematics of more than 30 industrial manipulators included in the library. Simulation of a teaching pendant programming tool.
- A manufacturing simulation in realistic environments.
- Spot welding.