ARTE es una librería para Matlab pensada principalmente para la docencia de robots manipuladores. Las características principales de ARTE son:
- Simula y programa un robot industrial dentro del entorno Matlab.
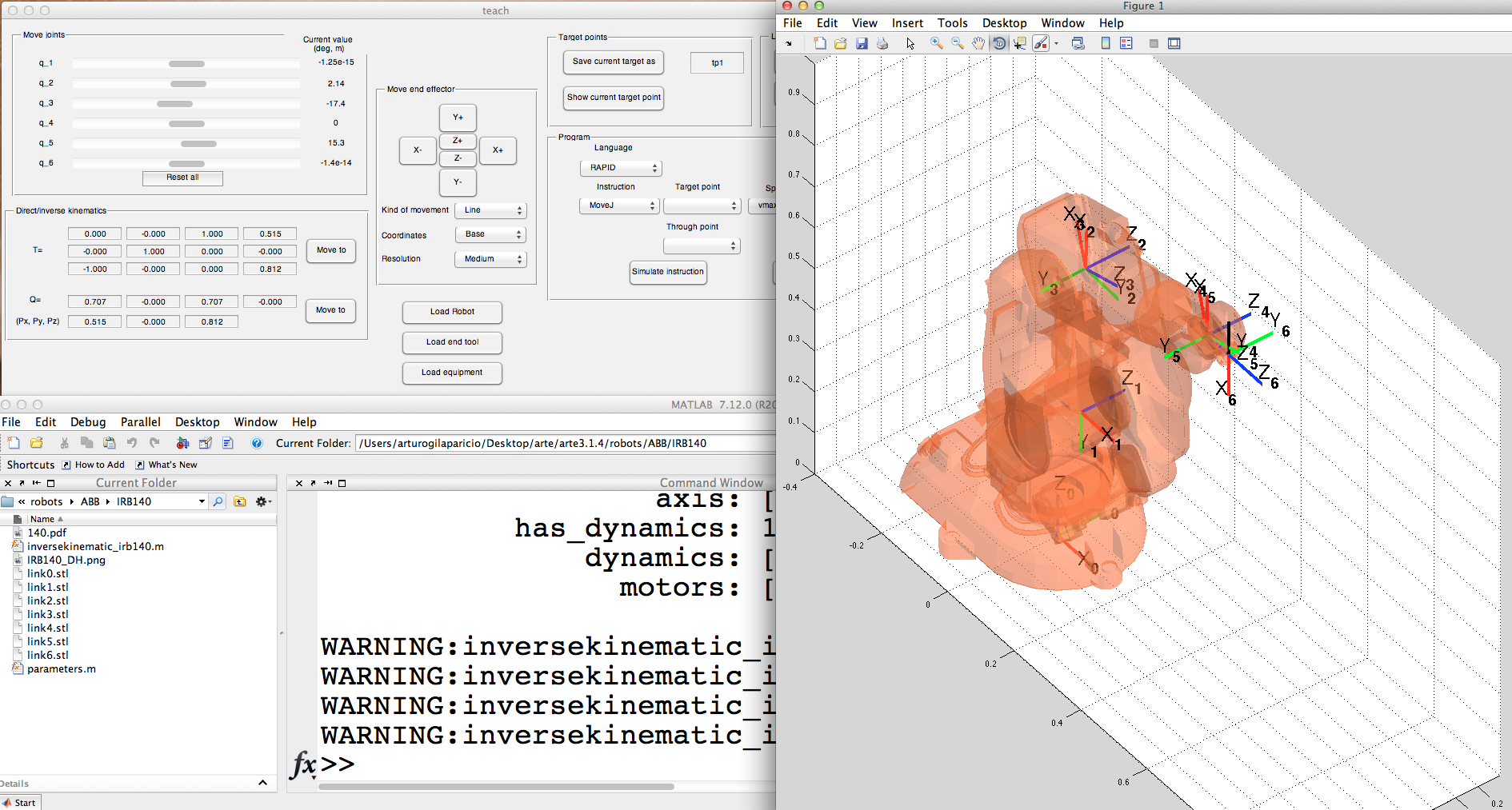
- Representacion clara de los sistemas de referencia Denavit-Hartenberg del robot manipulador.
- Capacidad para visualizar la posición, velocidad y aceleración de las variables articulares del robot durante la realización de un movimiento. Capacidad para visualizar la velocidad del extremo del robot durante la simulación.
- Capacidad para visualizar las fuerzas y pares existentes en las articulaciones durante el movimiento.
- Capacidad para visualizar la posición, velocidad y aceleración de las variables articulares del robot.
- Representación realista en 3D de los eslabones del robot como objetos sólidos.
- Planificación de trayectorias.
- Programación del brazo en un lenguaje industrial. Simulación paso a paso del lenguaje.
- Programación de forma interactiva mediante una paleta de programación virtual. Creación de puntos de destino y de paso de forma interactiva mediante una interfaz gráfica.
- Inclusión de nuevos robots: Es fácil introducir nuevos modelos de robots.
- Se proporcionan guiones de prácticas.
Creado por Arturo Gil en la Universidad Miguel Hernández de Elche con la ayuda de sus estudiantes de Robótica.
Por favor, envía comentarios y sugerencias a arturo.gil![]() umh.es.
umh.es.


DESCARGA
ARTE se distribuye bajo licencia LGPL:VÍDEOS
- El vídeo muestra las principales características de ARTE: (vídeo)
PRÁCTICAS
ARTE se acompaña de un conjunto de guiones docentes que se pueden realizar con la librería:- Práctica 0: Introducción a ARTE.
- Vídeo 0: Características principales de la librería.
- Práctica 1: Cinemática directa.
- Video 1: Calcula T a partir de q usando directkinematic(). Dibuja el robot en 3D.
- Práctica 2: Cinemática inversa.
- Vídeo 2: Calcula todas las q a partir de T usando la función inversekinematic().
- Práctica 3: Dinámica inversa.
- Práctica 4: Dinámica directa.
- Práctica 5: Programación en RAPID. (manual de RAPID, ABB IRB 140 en acción)
- Práctica 6: Control PID independiente.
- Práctica 7: Añade tu robot a la librería.
![]()
![]()
La lista completa de vídeos de youtube con las prácticas de ARTE están aquí. También en iTunes.
Aquí podéis encontrar material suplementario y más clases en Youtube.
INSTALACIÓN
Descargue y copie todo el directorio en su PC. Añada dicho directorio y subdirectorios al PATH de Matlab. Dentro de Matlab, sitúese en dicho directorio donde se ha copiado toda la librería e inicie la librería:>> pwd
ans =
/Users/arturo/Desktop/arte_lib3.1.4
La librería se inicia con el comando:
>> init_lib
Para ver las funciones principales de la librería, escriba:
>>help Contents
Si desea ver de forma rápida todas las capacidades de la librería, escriba:
>> demos
AYUDA
CAPTURAS DE PANTALLA
- Cinemática directa e inversa con más de 30 robots industriales incluidos en la librería.
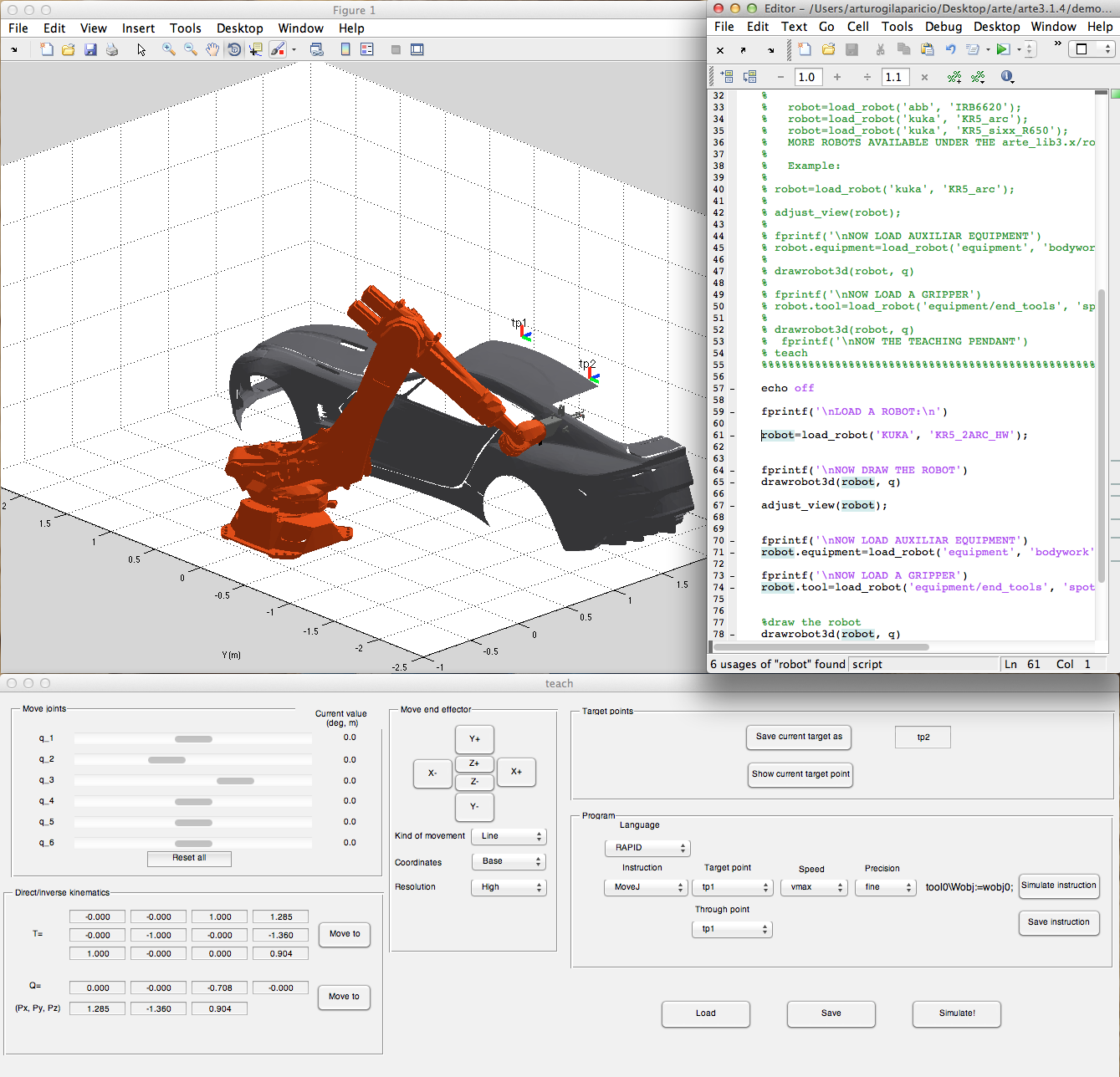
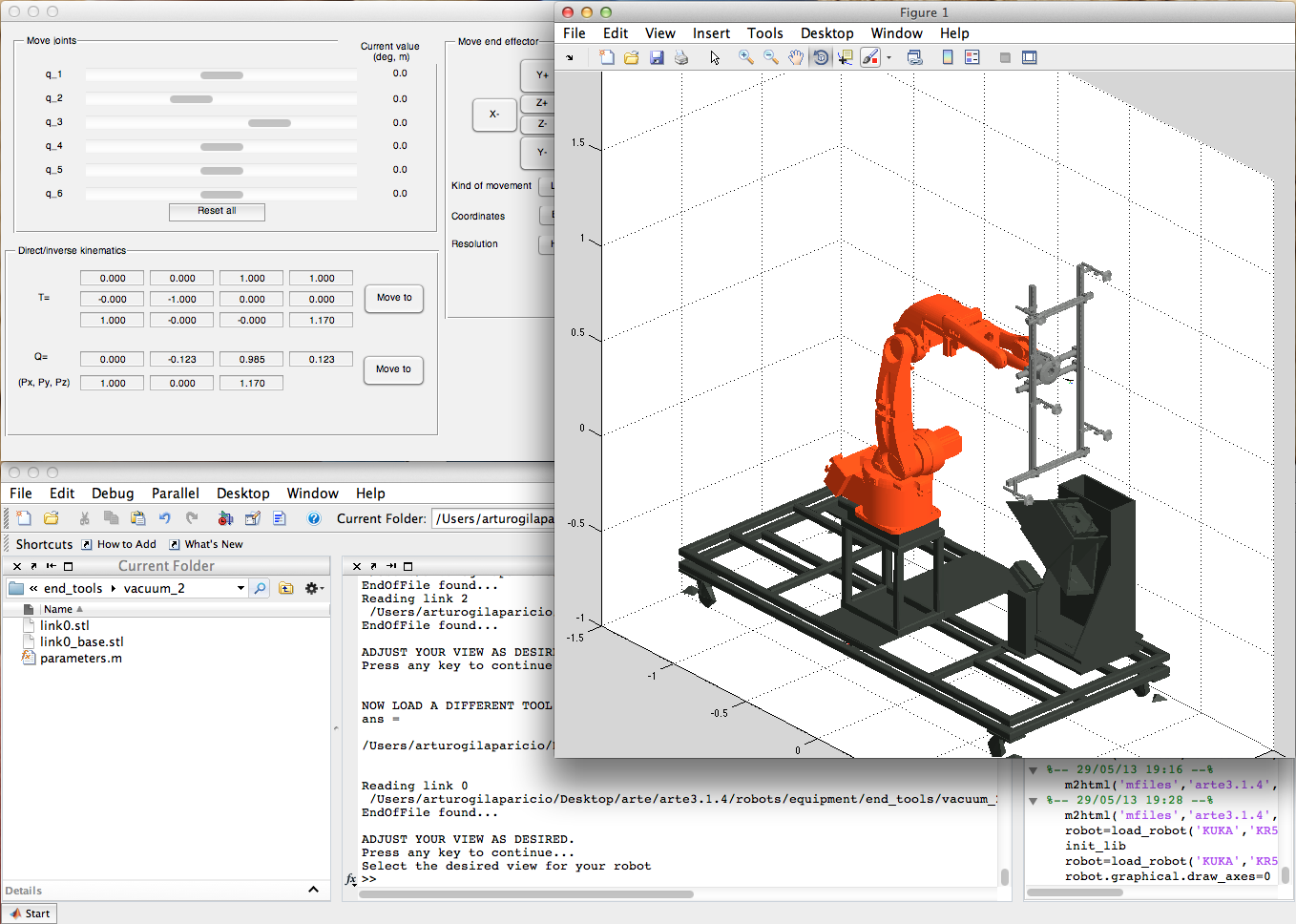
- Simulación de procesos de fabricación.
- Simulación de soldadura por puntos en una aplicación de fabricación.