|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
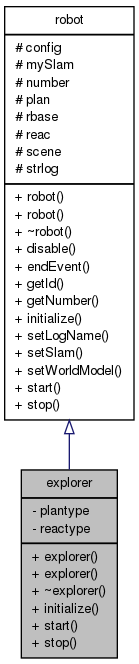
Implements the architecture of a mobile robot that explores the environment. More...
#include <explorer.h>
Public Member Functions | |
| explorer () | |
| Default Constructor. | |
| explorer (int number, slamInterface &slamProc, worldModelInterface &scene, const ConfigFile &config) | |
| Constructor. | |
| virtual | ~explorer () |
| Default Destructor. | |
| void | initialize (int number, slamInterface &slamProc, worldModelInterface &scene, const ConfigFile &config) |
| Initializer. | |
| void | start () |
| Initiatites the hybrid exploration of the environment. | |
| void | stop () |
| stops all actions execution | |
Private Attributes | |
| int | plantype |
| int | reactype |
Implements the architecture of a mobile robot that explores the environment.
Definition at line 34 of file explorer.h.
| explorer::explorer | ( | int | number, |
| slamInterface & | slamProc, | ||
| worldModelInterface & | scene, | ||
| const ConfigFile & | config | ||
| ) |
Constructor.
| number | ID number |
| scene | reference to virtual world object |
| slamProc | reference to slam object |
Definition at line 31 of file explorer.cpp.
| void explorer::initialize | ( | int | number, |
| slamInterface & | slamProc, | ||
| worldModelInterface & | scene, | ||
| const ConfigFile & | config | ||
| ) | [virtual] |
Initializer.
| number | ID number |
| scene | virtual world |
| slamProc | pointer to slam object |
Reimplemented from robot.
Definition at line 46 of file explorer.cpp.
 1.7.6.1
1.7.6.1

