|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
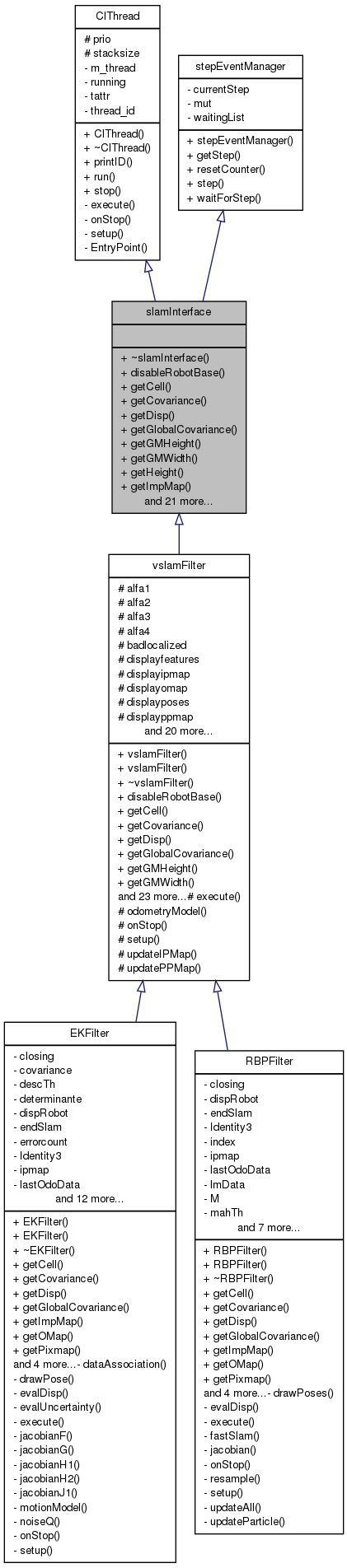
Interface for landmark-based visual SLAM algorithms. More...
#include <slamInterface.h>
Public Member Functions | |
| virtual void | disableRobotBase (int r)=0 |
| virtual point | getCell (int robot)=0 |
| returns the current cell of the robot | |
| virtual matrix | getCovariance (int robot) const =0 |
| returns the matrix that represents the covariance of the position of the robot | |
| virtual float | getDisp (int robot) const =0 |
| returns a measure of the dispersion of the robot | |
| virtual Ematrix | getGlobalCovariance () const =0 |
| returns the matrix that represents the covariance of robots and marks | |
| virtual int | getGMHeight () const =0 |
| returns the height in cells of the grid map | |
| virtual int | getGMWidth () const =0 |
| returns the width in cells of the grid map | |
| virtual float | getHeight () const =0 |
| return the height of the map | |
| virtual binMap * | getImpMap ()=0 |
| returns a copy of the current imprecise pose map | |
| virtual bool | getLoc (int robot) const =0 |
| return the current state of localization of the robot | |
| virtual int | getNumRobots () const =0 |
| return the number of robots | |
| virtual gridMapInterface * | getOMap ()=0 |
| returns a copy of the current occupancy map | |
| virtual QPixmap * | getPixmap ()=0 |
| virtual pose | getPos (int robot)=0 |
| returns the current pose of the robot | |
| virtual binMap * | getPreMap ()=0 |
| return a copy of the current precise pose map | |
| virtual QImage * | getQImage ()=0 |
| virtual float | getResolution () const =0 |
| returns the resolution of the gridmap | |
| virtual float | getSampleTime () const =0 |
| returns the period of the simulation time step | |
| virtual float | getTime () const =0 |
| returns the current simulation time | |
| virtual visualMap * | getVMap ()=0 |
| returns a copy of the current visual map | |
| virtual float | getWidth () const =0 |
| returns the width of the map | |
| virtual float | getXOrigin () const =0 |
| return the x position of the origin of grid map in real coordinates | |
| virtual float | getYOrigin () const =0 |
| return the y position of the origin of grid map in real coordinates | |
| virtual void | initialize (int nrobots, ConfigFile &configfile)=0 |
| initializer | |
| virtual void | setGridMapName (const char *)=0 |
| sets the name of the gridmap file | |
| virtual void | setHighThreshold (float thb)=0 |
| sets the high uncertainty threshold for the localization state | |
| virtual void | setLogName (const char *)=0 |
| sets the name of the log file | |
| virtual void | setLowThreshold (float tha)=0 |
| sets the low uncertainty threshold for the localization state | |
| virtual void | setRobotBase (int robot, robotBase &rbase)=0 |
| sets the pointer to a robot base object | |
| virtual void | setWindowName (const char *)=0 |
| virtual void | setWorldModel (worldModelInterface &scene)=0 |
| sets the world model | |
Interface for landmark-based visual SLAM algorithms.
Definition at line 36 of file slamInterface.h.
 1.7.6.1
1.7.6.1

