|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
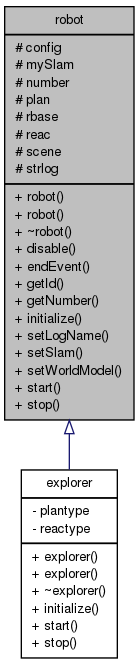
Implements the architecture for a mobile robot. More...
#include <robot.h>
Public Member Functions | |
| robot () | |
| Default Constructor. | |
| robot (int number, slamInterface &slamProc, worldModelInterface &scene, const ConfigFile &config) | |
| Constructor. | |
| virtual | ~robot () |
| Default Destructor. | |
| void | disable () |
| stepEventManager & | endEvent () const |
| returns the reference to the planner exploration concluded event manager | |
| int | getId () const |
| returns the robot id | |
| int | getNumber () const |
| returns the robot number | |
| virtual void | initialize (int number, slamInterface &slamProc, worldModelInterface &scene, const ConfigFile &config) |
| Initializer. | |
| void | setLogName (const char *str) |
| sets the log file | |
| void | setSlam (slamInterface &slamProc) |
| sets the reference to the slam object | |
| void | setWorldModel (worldModelInterface &scene) |
| sets the reference to the virtual world object | |
| virtual void | start ()=0 |
| Initiatites the hybrid exploration of the environment. | |
| virtual void | stop ()=0 |
| stops all actions execution | |
Protected Attributes | |
| const ConfigFile * | config |
| slamInterface * | mySlam |
| int | number |
| planner * | plan |
| robotBase * | rbase |
| reactive * | reac |
| worldModelInterface * | scene |
| char * | strlog |
| robot::robot | ( | int | number, |
| slamInterface & | slamProc, | ||
| worldModelInterface & | scene, | ||
| const ConfigFile & | config | ||
| ) |
| void robot::initialize | ( | int | number, |
| slamInterface & | slamProc, | ||
| worldModelInterface & | scene, | ||
| const ConfigFile & | config | ||
| ) | [virtual] |
 1.7.6.1
1.7.6.1

