|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
|
MRXT: The Multi-Robot eXploration Tool
Multi-Robot autonomous exploration and mapping simulator.
|
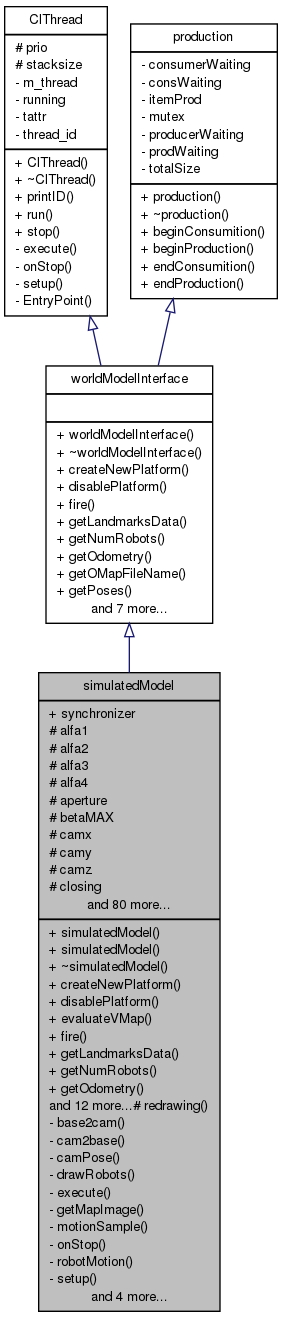
This class implements a virtual world for robots where robots can move and observe the environment. More...
#include <simulatedModel.h>
Signals | |
| void | changedPositions (rposes poses) |
Public Member Functions | |
| simulatedModel () | |
| default constructor | |
| simulatedModel (int nBots, ConfigFile &configfile, float sampletime) | |
| constructor | |
| virtual | ~simulatedModel () |
| destructor | |
| robotBase * | createNewPlatform () |
| void | disablePlatform (const robotBase &r) |
| double | evaluateVMap (visualMap &vm) const |
| int | fire (int robot) |
| landmarksData * | getLandmarksData (int robot) |
| returns the landmarks data | |
| int | getNumRobots () |
| pose * | getOdometry (int robot) |
| returns the robot odometry | |
| const char * | getOMapFileName () const |
| QPixmap * | getPixmap () |
| rposes | getPoses () const |
| rangeSensorData * | getRangeSensorData (int robot) |
| returns the range sensor current data | |
| float | getSampleTime () const |
| float | getTime () const |
| void | initialize (int nagents, ConfigFile &configfile, float sampletime) |
| initializes a virtual world with "nBots" robots in the scenario "scene" and initial poses given by "test" | |
| void | loadMapFile (const ConfigFile &config) |
| load a map file | |
| void | randomPoses (bool group, double maxInitialPoseDist, double minInitialPoseDist) |
| void | reset () |
| void | setLogName (const char *) |
| sets the name of the log file | |
| void | setNumRobots (int num) |
| void | setSpeed (int r, float v, float w) |
| sets the linear and angular speed for a robot | |
Public Attributes | |
| production | synchronizer |
| synchronizer | |
Protected Member Functions | |
| void | redrawing () |
Protected Attributes | |
| float | alfa1 |
| float | alfa2 |
| odometry params | |
| float | alfa3 |
| odometry params | |
| float | alfa4 |
| odometry params | |
| float | aperture |
| float | betaMAX |
| double | camx |
| double | camy |
| camera position | |
| double | camz |
| camera position | |
| ClMutex | closing |
| stop condition | |
| float | Cx |
| float | Cxp |
| float | Cy |
| int | desclength |
| wall / obstacles | |
| float | devError |
| sonar parameters | |
| float | distMAX |
| float | distMIN |
| float | drifttrans |
| odometry params | |
| float | elapsedTime |
| bool | endth |
| wall / obstacles | |
| float | f |
| float | gammaMAX |
| float | gammamax |
| pose * | gt |
| int | height |
| float | I |
| int | idCounter |
| int | imgheight |
| int | imgwidth |
| odometry params | |
| std::vector< feature > | landmarks |
| robot positions | |
| pose * | lastgt |
| pose * | lastodo |
| landmarksData * | lmData |
| char * | logstr |
| bool | mapLoaded |
| std::vector< line > | mapWall |
| landmarks | |
| float | maxDist |
| int | maxNumRobots |
| float | maxx |
| float | maxy |
| float | minDist |
| float | minx |
| float | miny |
| int | nBots |
| ClMutex | newIdsMutex |
| syncronization mutex on closing | |
| int | numfeat |
| int | numSensors |
| camera position | |
| pose * | odo |
| gridMapInterface * | omap |
| char * | omapfilename |
| robotBase ** | rbase |
| float | RealCx |
| float | RealCxp |
| float | RealCy |
| float | realError |
| float | Realf |
| float | RealI |
| std::vector< double > | robot_footprint |
| std::vector< pose > | robotPose |
| std::vector< std::vector< line > > | robots_lines |
| bool * | robotsEnabled |
| rangeSensorData * | rsData |
| double | rx |
| camera position | |
| double | ry |
| camera position | |
| double | rz |
| camera position | |
| float | sample_time |
| float | scalex |
| sensor covariance matrix | |
| float | scaley |
| matrix | Scam |
| bool | showsimulation |
| float | sigma2c |
| float | sigma2cp |
| float | sigma2Cx |
| float | sigma2Cxp |
| float | sigma2Cy |
| float | sigma2d |
| float | sigma2f |
| float | sigma2I |
| float | sigma2r |
| float | sigmac |
| float | sigmacp |
| float | sigmaCx |
| float | sigmaCxp |
| float | sigmaCy |
| float | sigmad |
| float | sigmaf |
| float | sigmaI |
| float | sigmar |
| int | step |
| speed * | velo |
| int | width |
Private Member Functions | |
| pos3d | base2cam (const pos3d &p) |
| translates a position in the robot's frame of reference to the camera frame of reference | |
| pos3d | cam2base (const pos3d &p) |
| translates a position in the camera frame of reference to the robot's frame of reference | |
| pose3d | camPose (const pose &robotpose) |
| returns the pose of the camera | |
| void | drawRobots (IplImage *&img) |
| void | execute () |
| primary execution loop | |
| IplImage * | getMapImage () |
| void | motionSample (const pose &lastPose, const pose &newPose, const pose &lastodo, pose &newodo) |
| creates a new odometry reading | |
| void | onStop () |
| called before stopping | |
| void | robotMotion (pose &pos, const speed &vel, float st) |
| moves the robot with speed vel for time st | |
| int | setup () |
| set up for the execution thread | |
| void | simCamAdquisition (const pose &robotpos, landmarksData &lmData, int nr) |
| captures features from camPose | |
| void | simRangeAdquisition (const pose &realPose, rangeSensorData &sonarData, int r) |
| simulates sonar/laser readings | |
| bool | testVisibility (const pos3d &realPose, const pos3d &mark, int nr) |
| auxiliary function to test when a feature is visible or not | |
| void | update_footprint (int r) |
| float | visibilityDistance (const pose &ori, const pose &dest, int nr) |
| returns the distance from ori to dest or the first wall in that direction | |
This class implements a virtual world for robots where robots can move and observe the environment.
Definition at line 59 of file simulatedModel.h.
 1.7.6.1
1.7.6.1

